 Dream
Drive -> Robot Dream
Drive -> Robot
|
|
|
G-ROBOTSの組み立てレビュー
- G-ROBOTSの紹介
 第12回ROBO-ONEにおいて、HPI
JAPANさんより、HPI賞としてG-ROBOTS(RR-001)を頂きました。HPI様、どうもありがとうございました。 第12回ROBO-ONEにおいて、HPI
JAPANさんより、HPI賞としてG-ROBOTS(RR-001)を頂きました。HPI様、どうもありがとうございました。-
G-ROBOTSは発売前から僕も注目してたロボットです。小型サーボやフレームがプラスチックであること
など、特徴が多いので他にも注目している人も多いと思います。
-
このままいきなり改造してしまうのも勿体ないので、まずは普通に組み立てて、レビューを書いてみようと思います。文章力の少ない僕なんで、なかなか参考にならないかも知れませんが、頑張って書いてみようと思います。
- 制作とレビューに関して
所要時間 : 写真を撮りながら、レビューのメモを取りながらで2時間45分。
注意 : 組み立ての説明ではないので、実際に組み立てる際は取扱説明書を見ながら行ってください。
下準備
|
|
|
|
 |
まず、箱を開ける前の状態のパッケージ。 この時点でめちゃくちゃ軽い!
本体が1kgを切っているのはここからも納得できます。 |
|
|
|
パーツ数は、どうなんでしょう・・・。
僕は意外と少ない印象を受けました。
(もっと多いと思ってました。)他のロボットと比べた場合、汎用のブラケットがたくさん入ってるのではなく、全て専用のブラケットです。
コントローラーが入っているのは特徴的ですが、同時にネジが少ないことも驚きでした。 |
 |
|
|
|
 |
取扱説明書にはサーボホーンを取り付ける工程が書かれていますが、箱を開けてみるとすべてのサーボにサーボホーンが取り付けられていました。
これは、かなり時間短縮になります。 マニュアルはCD媒体となっています。
個人的には紙媒体が良かったなぁと思います。 |
|
|
|
「組み立て終わったらすぐに遊べるように、本体を組み立てる前にリポの準備をしておきましょう!」とのこと。 このユーザーへの配慮には感動しました!
うん!遊びたい!! |
 |
|
|
|
下半身
|
|
|
|
 |
まずは、下半身からということで、足裏から組み立てるのですが・・・ いきなりハメ込み式でした。
この足裏のハメ込みが全体を通して一番怖かった印象があります。
失敗して、2回ほど外しましたが、意外と丈夫な印象がありました。
それでも、ツメが大きいのでこの作業が一番怖かったですね。
(説明書はちゃんと読んでから作業しましょうw) |
|
|
|
直行軸がほんの数十秒で出来てしまう驚き。
過去に、KONDOの2350で同じ軸配置の直行軸を作ったときは、ネジをまわすのでかなり労力を消費したのを思い出しました。
ハメ込みで一瞬で終わってしまうところがステキです。 |
 |
|
|
|
 |
2個作っても。1分くらい。 |
|
|
|
さっそく、足裏に直行軸を取り付けるのですが・・・。 |
 |
|
|
|
 |
あれ? グラグラしますよ??
サーボに関係なく関節動きますよ??? |
|
|
|
・・・と、思いきや、ちゃんと固定具が用意されていて安心。
安全に配慮してトルクリミッタが付いているということだったのですが、この構造のことだったんですね!
(結構心配になりました。トルクリミッターの話は聞いてたけど、こんなにトルクがないんじゃ歩けないんじゃないのかと・・・早合点でした。)
ここで初めてドライバーを使いました。 |
 |
|
|
|
 |
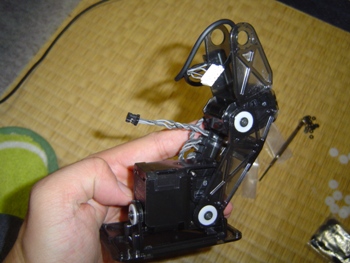
このロボットの一番の見所は、この小さなハブだと思います。
ロボットの配線はいろいろ苦労しますが、ロボットのいたるところに、ハブを内蔵しているロボットはこのG-ROBOTSくらいじゃないでしょうか?
ちなみに、反対軸から配線を逃がすところに、ゴム製のパッキンのようなものをつめるのですが、これは結構めんどくさいです。 |
|
|
|
足1本でひとつのハブを持っています。 同じシリアル方式のサーボを使用している二足歩行ロボットのbioloidでは、配線に関してはかなりいい加減な印象を受けた記憶があります。
全工程を通してG-ROBOTSの配線の綺麗さは見習いたいものだと思いました。
というか、ハブをこんなにたくさん用意して・・・それで1kg切ってしまうのが、やっぱりすごい。 |
 |
|
|
|
 |
両足完成。 無理な配線の取り回しもないし、比較的に素直な作りになっているので、プラモデルの経験くらいでサクっと作れちゃうんじゃないかな?
ちなみに腰の制作の写真を取り忘れました!!
(作るのに夢中になってしまって、ごめんなさい;;) |
|
|
|
上半身
|
|
|
|
腕にもハブがあります。 腕のハブは1つポートが余っているようで、足と規格をそろえたからなのか・・・。
それとも、オプションで「上腕のヨー軸」か「ハンド」かなにか出るんでしょうかね?? |
 |
|
|
|
 |
胸部です。 ここもハメ込みばっかり。 内部の写真も取ったのですが、ピントが合わずに使える写真がなくてすみません。
でも、ここが、一番開発者が苦労してそうな気がしました。 これだけ詰め込んで、ちゃんと配線が逃げるところに感動しました。 |
|
|
|
頭部の組み立て。 20軸っていうのが、腰の回転を含んでいるんだと思ったら、頭部の回転だったので、スタッフのこだわりにちょっと笑ってしまった。
しかも、頭部の中にLEDが標準で入っている。すごい!
でも、まず改造するとしたら、一番にここかなぁと思ってしまった。
開発者さんごめんなさいorz |
 |
|
|
|
 |
よく見たら眉毛がついてる!! |
|
|
|
ショルダーに保護パーツが付いているのかと思ったら、特別な機能はなさそう。 ステッカーを貼るためだけに作られたパーツのよう。
これもある意味「こだわり」ですね。
これだけ見た目用のパーツも詰め込んでこの重量、本当に末恐ろしいロボットだわ。 |
 |
|
|
|
完成!!!
|
|
|
|
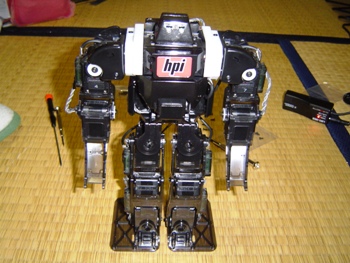 |
下半身に後から作った上半身をドッキングして完成! あらかじめ充電しておいたリポ電池ですぐに、ホームポジションが確認できました!
腰のサーボはかなり負荷が強いみたいで、この状態で結構熱くなってます。
サーボはともかく、フレームはどのくらいまで熱に耐えられるんだろう・・・。 |
|
|
|
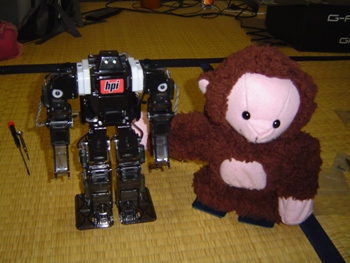
手元にあったSARUBOと記念撮影
・・・もとい、身長比べ!SARUBOより小さいことが判明!!
流石に重量ではSARUBOの方が軽いけど、これで20軸でセンサーも搭載しているというのだから驚き! |
 |
|
|
|
 |
これが、G-ROBOTSのマイコン。レビューを書き始めて何回「小さい」と書いたか分からないが・・・本当に小さい!
ロボットのCPUは「自作派」として、いつもマイコンの半田付けから作っているのだが・・・。
これを作るのは無理です!
軽すぎ!小さすぎ!
これでセンサー内臓と言うんだから・・・もうorz
CPUに何の石を使ってるかが、気になりますね。 |
|
|
|
オマケでコントローラー、バイブレーションのスイッチが見えるのですが・・・。機能的な面でもPSコントローラーをここまで再現するとはすごい。
ただし、単4電池が4本必要と言うのは、ちょっと負担大きいかな。
ロジクールのPS2の無線コントローラーを考えると電池2本で行けるんじゃないかと思うのですが・・・。 採用してる石が5V駆動なのかな? |
 |
|
|
|
組み立ててみての感想
-
僕が過去に組み立てた市販ロボットはバイオロイドだけですが、それと比較して、このロボットは非常に組み立てやすいロボットだったと思います。
ネジをしめる作業と言うのは、意外と根気が必要でめんどくさい作業なのですが、そのほとんどをハメ込み式にしてしまって、省略してしまえるのは、素材がプラスチックである所以なのでしょうね。
- レビューのネタを考えながらの2時間45分でしたが、慣れれば1時間ちょっとくらいでも組み立てられそうな気がします。
そういう意味でも、プラモデルに近い感覚で組み立てられるとても面白いロボットでした。
-
外見的には、寸胴なイメージもあったのですが、組み立ててみると思ったよりは意外とそういうわけでもなくて、案外ガンダムなどのロボットキャラクターも作れちゃうんじゃないかと思いました。
とはいえ、腰はやっぱり大きいので、デフォルメなど、それなりに覚悟は必要ですが・・・。
サーボのサイズやマイコンのサイズを考えると今後、ぬいぐるみをはじめ、人形系やアニメロボットの再現性重視のホビー分野で活躍してくれるものと思います。
サーボ自体を改造して組み込む人もいますが、このサーボならノーマルでも細い足とか十分いけると思います。
少なくとも次のKUMACOシリーズには使えそうだな、という印象を持ちました。
あとサーボもシリアルなので、ゆくゆくはSH2で制御するプログラムも書いてみようとは思います。
ただ、現状どんなマイコンを使ってもマイコンが付属のコントロールボードより小さくなりえないので、少し迷っているところ。逆運動学を計算してみようかとも思うのですが、マイコンを乗せることで逆に重くなって歩かなくなりそう。
- さて、次は運動性能とセンサーに注目しながらモーション作りに挑戦したいと思います。
-
みっちー ( 2007.09.26 )
遊んでみた!
-

-
さっそく遊んでみた。
-
何がすごいっていうと、初めから入っているモーションで、キャリブレーションなしで、ガンガン歩く!
歩行もしっかり足が上がっていて綺麗に歩く。
走る!
組み立てただけでバトルできる!
攻撃しながら体重移動で旋回してみたり、本当に面白い。
トルクリミッターがあるので怪我の心配はないし、こんなにユーザーフレンドリーで、入門にぴったりなロボットはないんじゃないかと思う。
-
欠点はというと、トルクリミッターのおかげで壊れないのはいいのだけれども、原点がずれるのと、どんどんホーンのネジが緩んでしまうこと。
-
あと、10分くらい暴れさせると、腰が熱くなって、腰のモーターだけトルクオフしてしまいました。操作に慣れずになんどもコケて起き上がりをやらせたせいもあるかな??・・・いずれにせよ、直立時でも腰のモーターに相当負荷がかかっているみたい。発熱でトルクオフは競技中には致命傷になるのでここは改善方法を見つけたい。
-
いずれにせよ、とにかく面白い。
今は動かすのに夢中になってます。
-
今まで、こんなに操作性の良いロボットはいじったことがなかった。
KUMACOも今までの集大成としてはかなり動けるロボットなんだけど、なんせ膝がない。KOKUTENにしても作り込みは甘かったと思う。このロボットを通してよりステップアップしてこうと思います。やっぱりロボットは動くから楽しいね!
-
みっちー ( 2007.09.28 )
|
|

▽TOPに戻る |