|
|
- ダウンロード
-
◆ ダウンロード [Joytxt.zip](75KB)
-
上のダウンロードをクリックしてください。Zip圧縮されているため、解凍ソフトで解凍して使用してください。
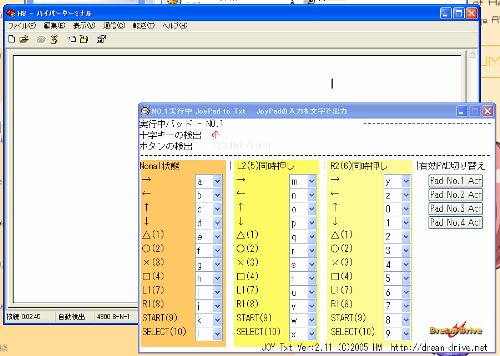
- 「JOYtoTxt」Ver.2.11の使い方
-
使い方としてはこのような形でハイパーターミナル(ターミナルソフト)を同時に使用します。
コノソフトをバックグラウンドで起動しているだけで、ボタンを押せば、ボタンに割り振ったアルファベット(数字)をハイパーターミナルに
入力します。(対応するキーを押したことになります。)
-
ウィンドウはハイパーターミナル側をアクティブにしてください。「JOYtoTxt」は常に前面に表示されるよう設定されています。
-
マイコン側でキャラクタ入力に対応するモーションを割り振っておけば、あたかもジョイスティックに連動してロボットが動作しているように見えます。
-
なお、”押した瞬間に動作”しますが、”押しっぱなし”には対応していません。
押された瞬間のイベントのみ監視しています。
-

- 接続例
-
過去に製作したロボット・KOKUTEN2を例にとると下のように接続しました。
|
ロボット側 |
H8/3052マイコン
↑↓(シリアル通信)
Bluetoothドングル
|
|
パソコン側 |
Bluetoothドングル
↑↓(シリアル通信)
パソコン上(ハイパーターミナル)
↑(1バイト(アスキーコード)送信)
パソコン上「JOYtoText」
↑↓(USB接続)
ジョイスティック(市販品)
|
-
その後
- 機知のバグ
ボタン割付設定の際、キーボードによる直接指定をした場合設定が反映されない可能性があります。
マウスで指定してください。- その後
いろいろなコマンドを送ろうと思うと文字コードじゃ足りません。
1バイトコードなので0x00から0xFFまで256通りのコマンドを送れるのが普通なんですが、文字コードということで、余計に制限されています。- また、このソフトウェア自体にシリアル通信機能を持たせれば、振動データなども扱えるので、表現力が数十倍に・・・。と思って、直接COMポートを叩くプログラムも製作していたのですが、
「ロボットと共ににパソコンも持ち歩かなければならない」、と言う労力を考えるとコントローラー
から直接シリアルを出力出来るようにした方が、レスポンスも効率もいいと言う結論に至り(※)開発を中止しました。
- ※
実際に、KOKUTEN3ではプレイステーションの無線コントローラーをそのままロボットに接続する方式に変更しています。
|
|