|
|
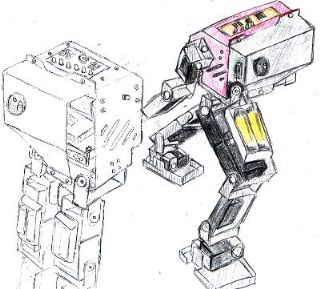
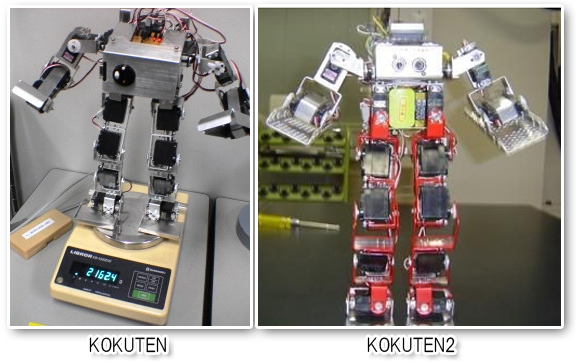
KOKUTEN & KOKUTEN2
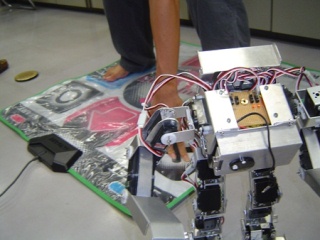
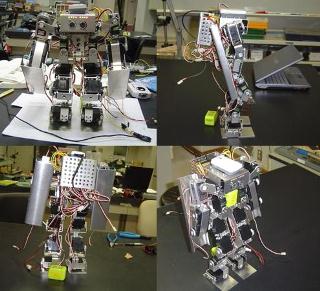
- KOKUTENの概観とスペック
-
最初に作ったロボットの紹介。
-
 -
|
KOKUTEN スペック |
| CPU |
秋月 H8/3052 25MHz × 1 |
| 出力 |
近藤科学 PDS-2144 FET × 10
近藤科学 PDS-2174 FET × 7
近藤科学 KRS-786 × 1
合計18軸構成 |
| センサ |
近藤科学 ジャイロKRG-2 × 2 |
通信
(無線RS-232C) |
I・O DATA RS-232C無線トランシーバ WNA-RS(x2) |
| 重量 |
2162.4g |
-
|
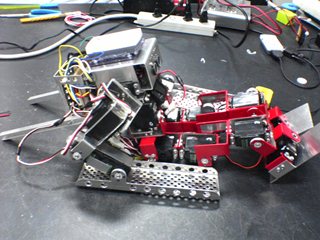
KOKUTEN2 スペック |
| CPU |
秋月 H8/3052 25MHz × 1 |
| 出力 |
近藤科学 PDS-2144 FET × 8
近藤科学 PDS-2174 FET × 7
近藤科学 KRS-786 × 1
GWS S03T/2BB × 3
合計19軸構成 |
| センサ |
近藤科学 ジャイロKRG-2 × 2
ベストテクノロジー USセンサ2 × 1 |
通信
(Bluetooth) |
キャノンアイテック UB-6010 |
|
|