 Dream
Drive -> Robot Dream
Drive -> Robot
|
|
|
KOKUTEN3
- KOKUTEN3の概観とスペックについて
-
 -
CPU : SH2/7144F(インターフェースの付録)
コントローラー : デュアルショック
関節自由度
腕部:3自由度 (×2)
脚部:6自由度 (膝ダブルサーボ)(×2)
胴部:1自由度
(合計19自由度)
アクチュエーター : AX-12
加速度センサ : XYZ3軸× 1
温度センサ : 内部用×19
LED表示 : 3色電池残量表示
バッテリー :
リチウムポリマー12.6V 1300mAh
質量 : 1900g(バッテリー込み)
|
|
|
|
- KOKUTEN3
-
KOKUTEN3は、僕がサークルで作っていたKOKUTENシリーズを引き継いで作った、KOKUTENシリーズ3代目のマシンです。モーターもKONDO
のPDS-2144から、デジタルデータで制御できるベストテクノロジーのシリアル通信サーボ、Dynamixel
AX-12に変更になりました。
足位置のXYZの制御はKOKUTENシリーズの特徴ですが、KOKUTEN、KOKUTEN2は「X Z θ」で、Y軸方向の正確な計算が出来ず、今回がはじめての正確なXYZの計算がきちんと出来るマシンとなりました。それに合わせて、歩行モーションもパラパラ漫画方式から軌跡を計算するロボットとなっています。
- KOKUTEN3の技術
-
・二足歩行ロボットの
脚部の6軸逆運動学を幾何学に解いてみた
・Robotis製
Dynamixel AX-12を制御する
- 製作記録動画
KOKUTEN3の製作記録を動画にしました。-
中身
- バックパックについて
-
 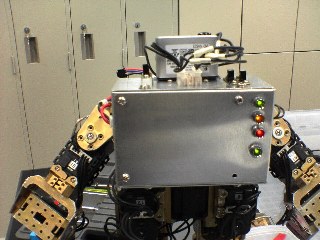
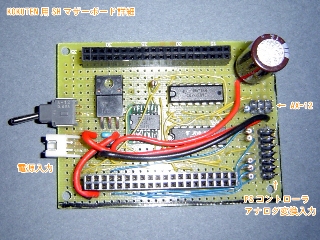
ここにAX-12サーボモーターのコントロールとモーションの制御を行うSH2の制御基盤が搭載されています。
背面は3色のLEDで電池の残量を表現しています。これによりリチウムポリマー電池のバッテリーを消耗の度合いが分かります。ちなみに、残量が残り少ないのに気づかず著しく電圧降下させてしまった場合は、プログラムにてアクチュエーターへの電力をカットします。
また、プレイステーションコントローラー(デュアルショック)との接続はみすみロボット研究所さんの記事「インターフェース付録基板でロボット制御(その14)」を参考にして、接続しています。
- SH2/7144Fでの処理
KOKUTEN 3 の最大の特徴は、歩行のモーションを全て計算にて行っていることです。
計算内容については、「XYZで足位置制御を楽しもう!」にて触れていますが、この計算をベースに、更に歩行モーションを正弦波をベースとした軌跡で描き、その正弦波の振幅の大きさで歩行速度と歩行の方向、または前進・後退の制御を行っています。
また、その振幅の大きさをそのままデュアルショックのアナログスティックの値を用いることでスムーズな操作が行えます。
搭載した3軸加速度センサは、KOKUTEN3のおおまかな、姿勢を入力するのに使います。基本的には、起き上がり時に、転倒方向を確認するのに使うくらいですが、これによって、コマンドの入力時にユーザー側で転倒方向を目視する必要がなくなります。
他に、AX-12のポジション機能を使ってロボットにモーションを覚えさせる部分は、かなりUIを作り込みました。
バイオロイドやKHR-1に見られる、シーンの追加・削除・カット・挿入と言ったやり方のモーションの編集も起動中にこなせるので、新しいモーションの追加もスピーディーに行えます。
大会への参戦
- 2006/11/18 ロボファイト4 (大阪産業創造館)
-

-
バトルカオスにおいては無難にポイントを稼いだものの、本戦でのバトルはストレート負けのさんざんなものでした。
原因としては、軌跡の歩行モーションが微妙にパラメータの調整がうまくいっていなかったのと、どうも木の足裏とリングの摩擦力が小さすぎてスリップの連続だったことだと思います。
足裏のグリップ力はの変更は歩行モーションを大きく崩し、なかなか変更が効かないのでその辺をちゃんとリングにあわせて作らないといけなかったと反省しました。
あと、当然ですが、本戦においては歩行モーションよりも攻撃モーションの作りこみが物を言いますね!
- 2006/8/20 夏戦Ⅱ in RoboCountry IV
-

- 第一回戦で振武にあたってやられました。
どうもカントリー4では僕のトーナメント運がないようです。
この時はまだ、基盤がSH2ではなくH8ですので処理速度の問題を抱えていましたが、いちおう歩行の軌跡リアルタイム制御は搭載していました。というか、今思えば処理が遅いものの、歩行はこのときが一番安定していたような気もします。
たぶん、軌跡が間違っているんでしょうね。処理が遅くて動きがいいってことは、正弦波的な軌跡より線形的な軌跡のほうがロボットにとっては都合がいいのかもしれません。
|
|
▽TOPに戻る |
|