Dream PathFinder
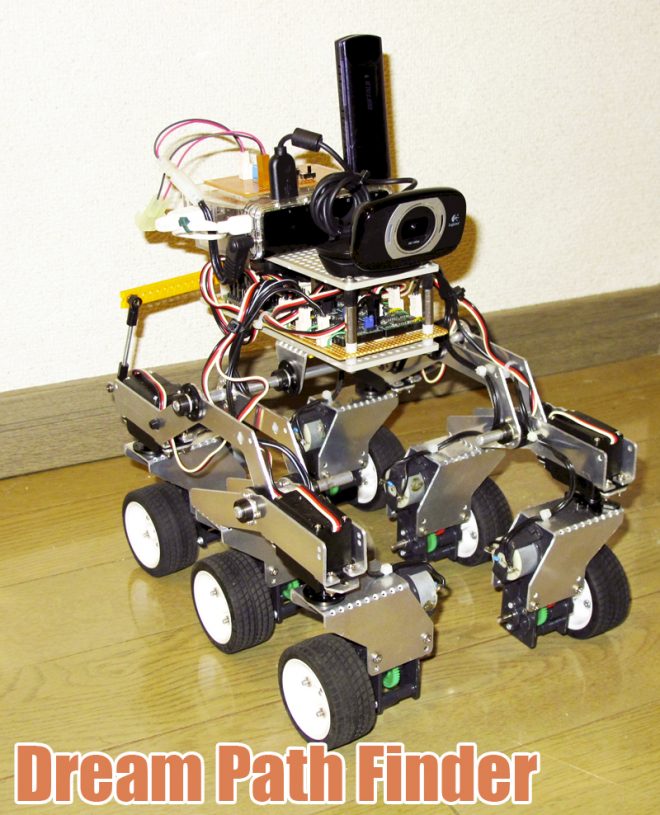
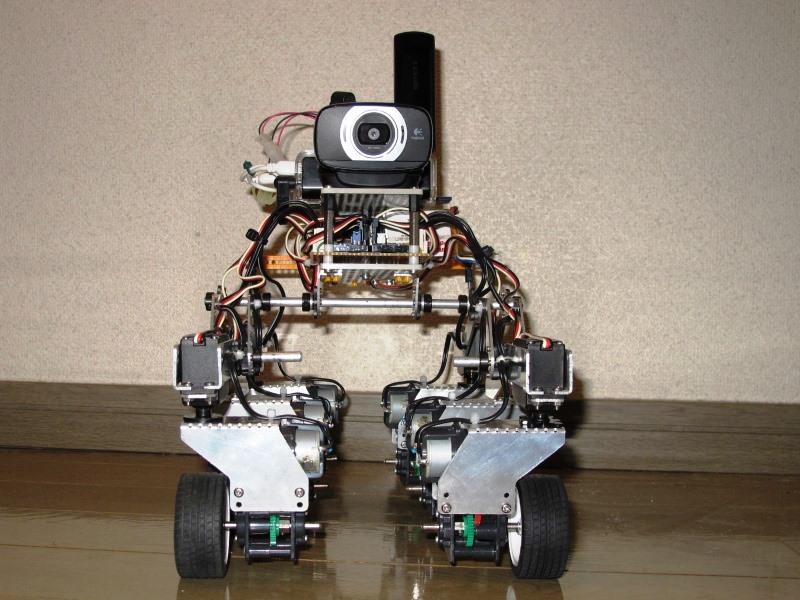
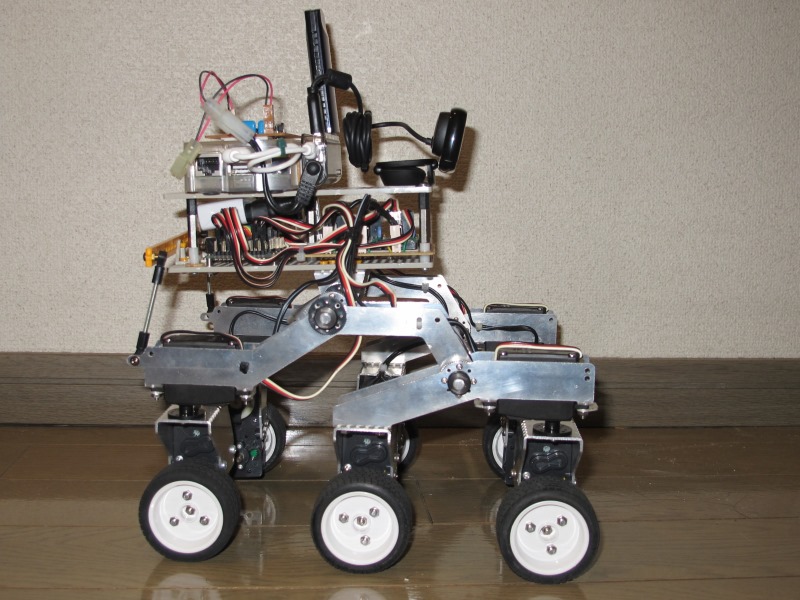
NASAの火星探査機に代々受け継がれる、ロッカーボギーリンク機構を模した足回りのロボットです。
ロッカーボギーリンク機構を作ってみたくて作りました。
CPUには、RaspberryPi (初代)を用い、広角レンズ搭載のWebカメラからの画像をストリーミング配信します。
ロボットとコントロール用PCの間は、無線LANを用いて通信しています。
また、ロボットの制御系は、Vstone社のVS-RC003を用いて、制御しています。
モータドライバは、KONDO社のUMD-280を6機用いて、これもVS-RC003から、サーボモータ用の信号で制御しています。
画像
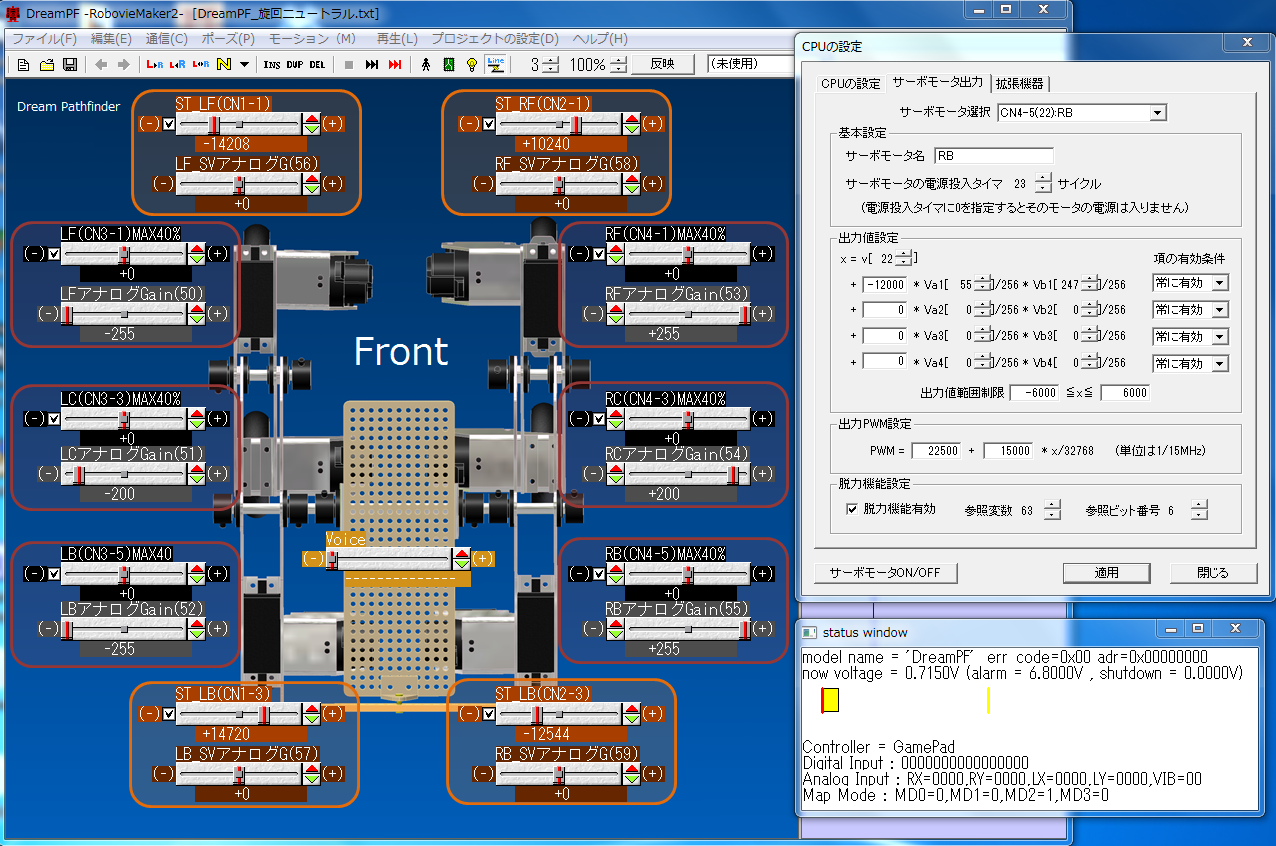
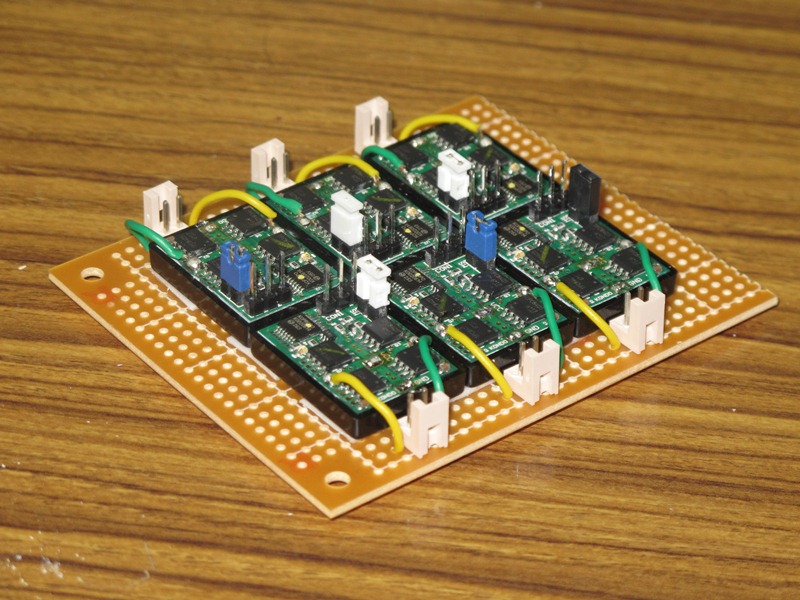
Vstone社 RobovieMakerにてプログラミング / モータードライバ6機合体基板

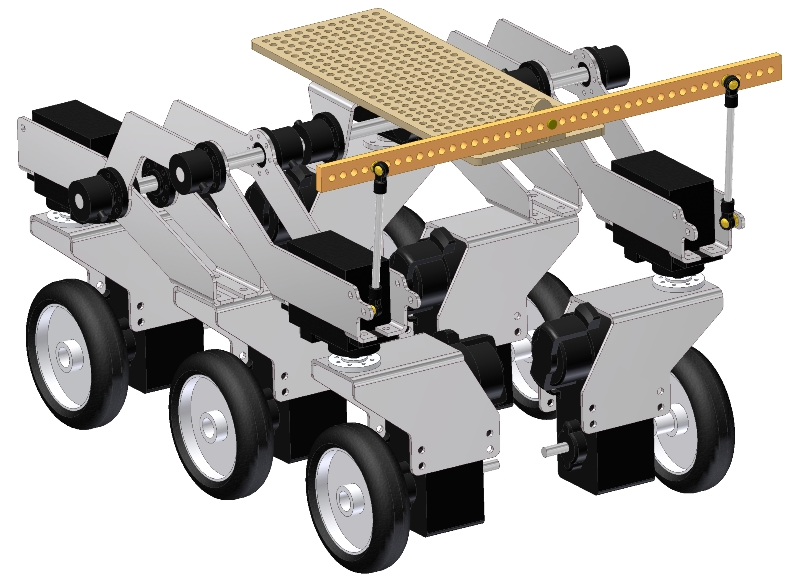

設計中の3D CAD画像/ロッカーボギーリンクの構造とか…
動画
製作動画

機体が出来上がった時点での動画です。
この時は、RaspberryPiはまだ未搭載でした。
走行動画

RaspberryPiを搭載しました。
別室からの操作で、機体の状況はすべてカメラからの画像を頼りに操作します。