かっこいいポーズをキメる上半身ロボットをつくったよ
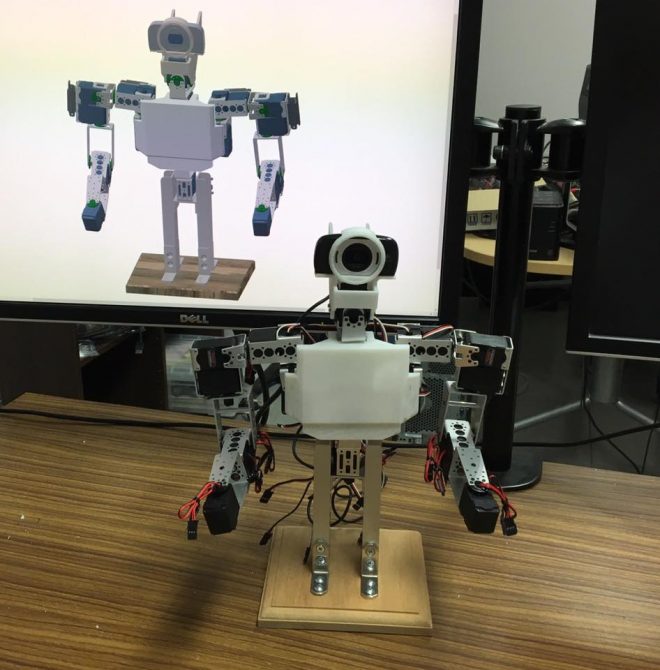
かっこいいポーズをキメる上半身ロボットを作りました。
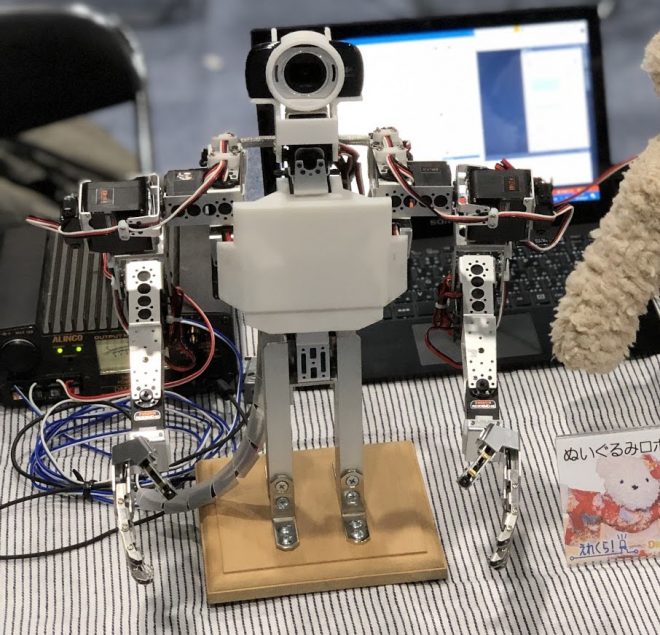
Maker Faire Kyoto 2019(1日目のみ)で、「えれくら!」のブース展示させていただきました。作り始めて2年ほど立ちますが、展示会に出すのは初めてで、いろいろ反響いただいて嬉しい限りです。
動く様子はこんな感じ!
というわけで、ひたすらポーズを取ってくれるロボットです。
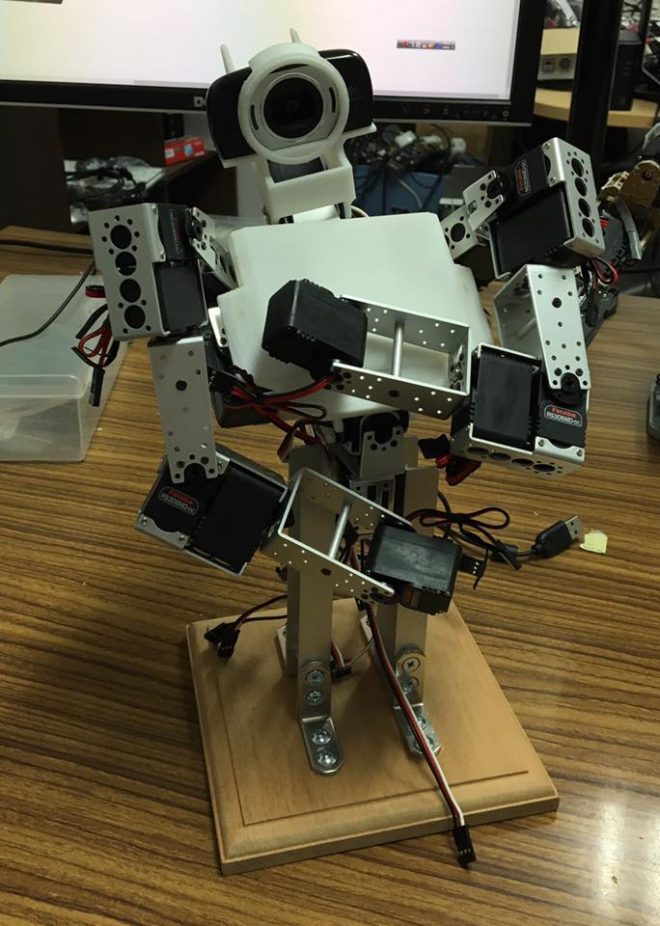
ハードウェアの特徴
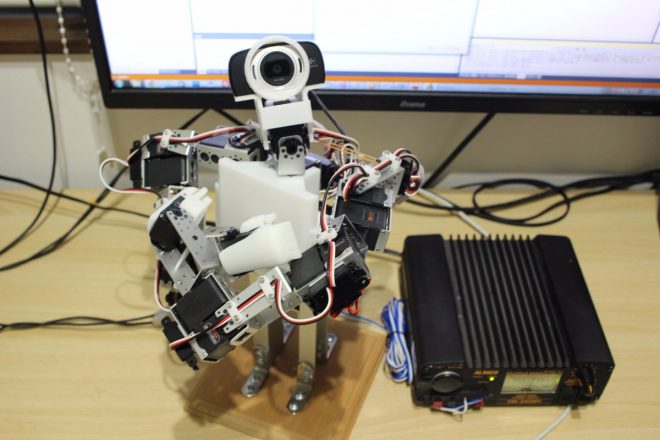
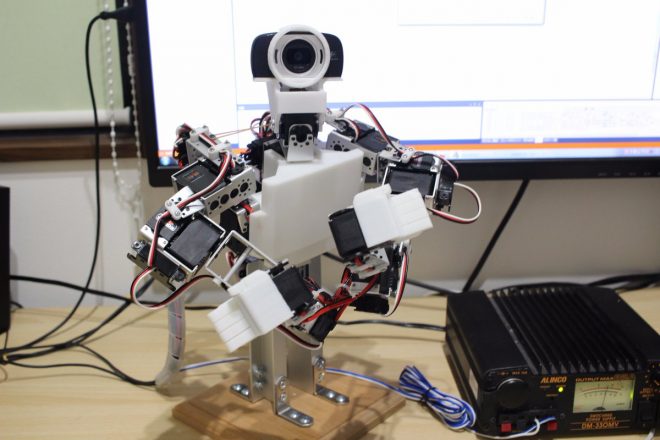
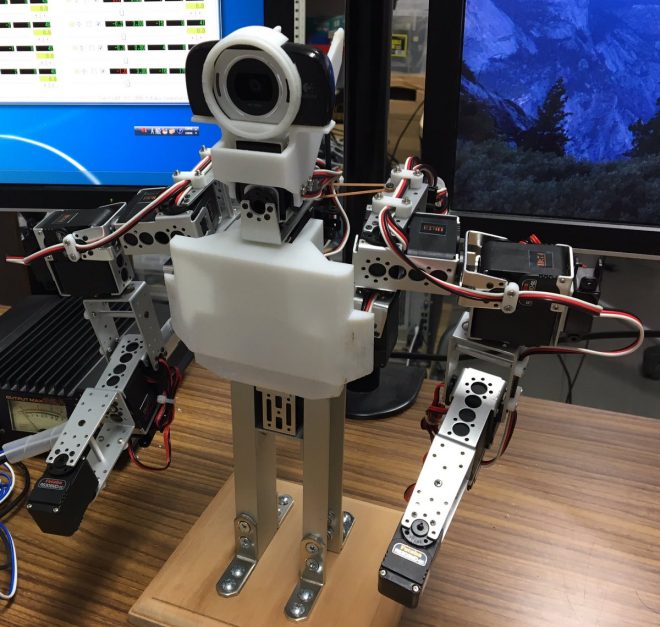
ハード面の特徴は上肢帯の動きを再現するための軸があること、上肢帯というのは、いわゆる肩甲骨と鎖骨の動きですね。これが最大の特徴です。
Pepperより肩の動きは人間っぽいと勝手に自負しています(笑)
上半身だけで22軸あります。

また、マイコンを積んでおらずサーボモーターとPCのシリアルポートが直結していることも特徴です。パソコンもロボットの一部といった感じです。
基本的には、双葉のアルミフレームを極力利用して、既存の部品を直列に繋いだような設計になっています。既存のパーツを買えばある程度、同じものが作れるようになっています。
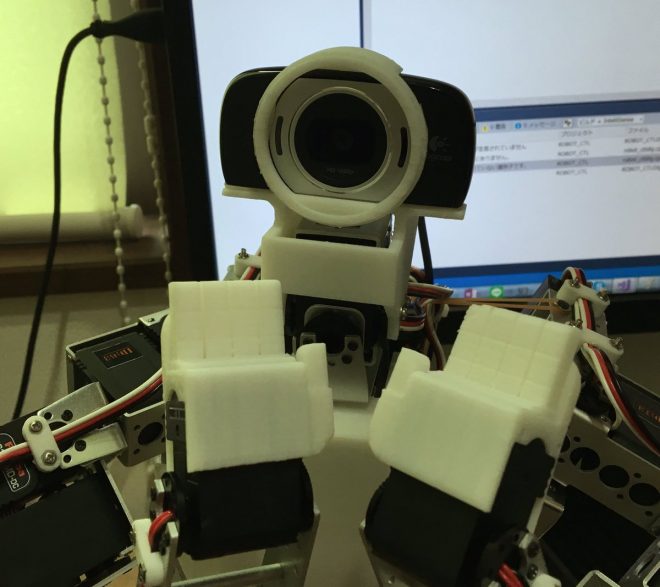
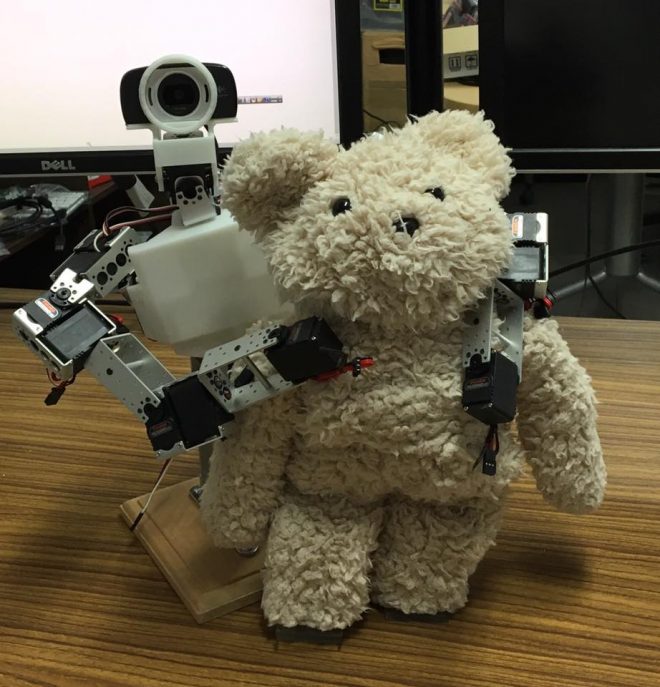
ボティや頭だけは3Dプリンタで作りました。
ちなみにカメラは”今の所”かざりです。
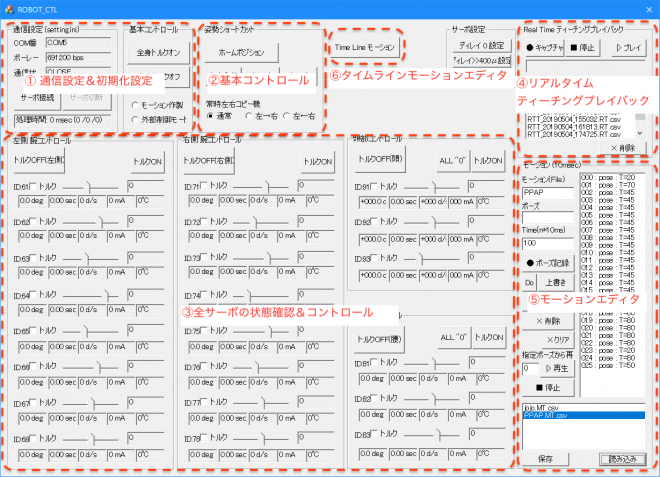
ソフトウェアの特徴
ソフト面では、制御とモーションの部分をVisualStudio (VC++ & MFC)で、フルスクラッチで作りました。
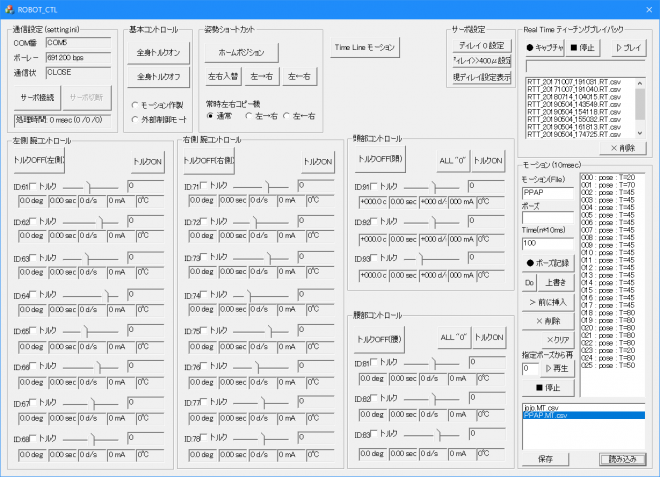
Windowsからシリアルサーボ(双葉製のRS304MD)を22個、RS232Cを1ポートにデイジーチェーンで直接制御した上で、制御周期90Hzを達成しています。
かなりアクロバティックなタイミング制御を実装しました。
実際、安定的に動かすなら複数ポートに分けるほうが正解と思います。
モーションの作成方法としては、3種類用意しています。
- ノーマルモーションエディタ(一般的なホビーロボットと同じ)
- リアルタイムモーションプレイバック
- タイムラインモーションエディタ
リアルタイムモーションプレイバックとタイムラインモーションは、あまり馴染みがないかもしれません。
がっつりメモリを使うのでPCから直接制御するメリットかなと思います。
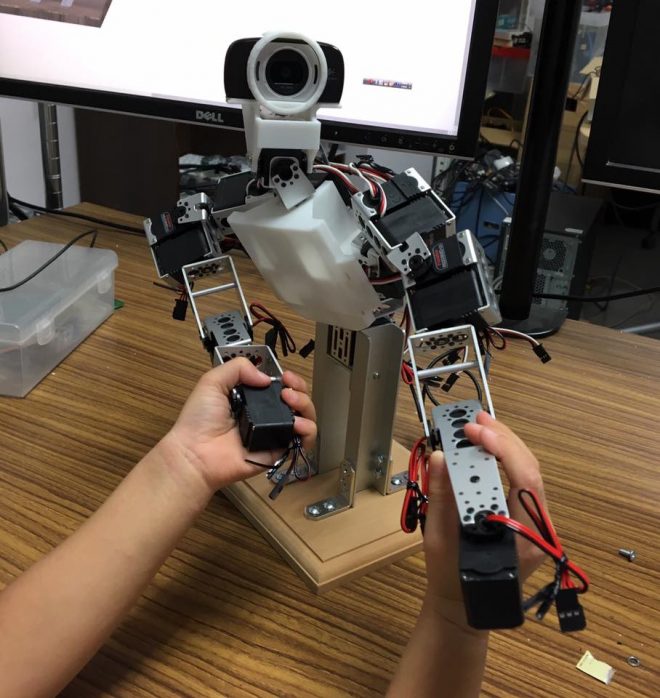
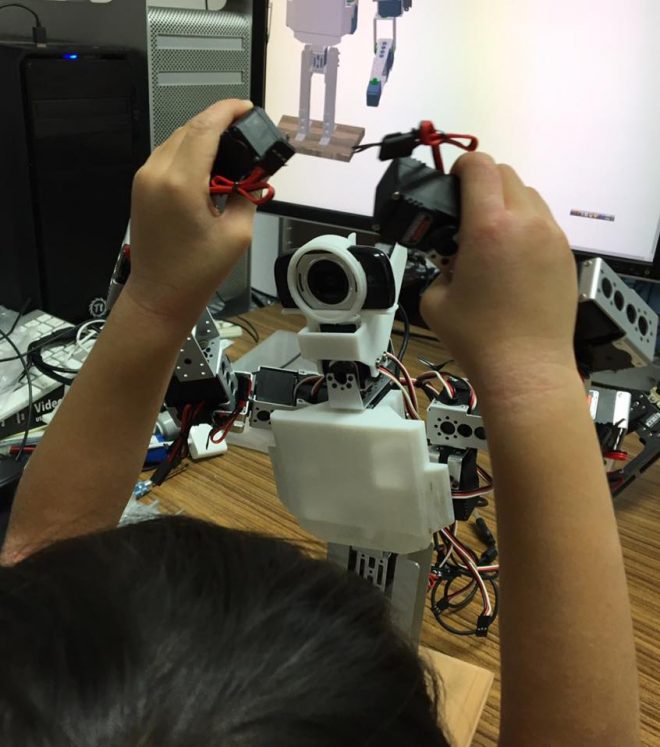
リアルタイムモーションプレイバック
手で動かしたロボットの動きをそのまま記録する方式です。
ビデオカメラの録画に似ています。
「キャプチャ」ボタン「再生/停止」ボタンしかありません。左右の鏡モードなどを駆使して、即興でモーションが作れる仕組みです。
少し間引いて30Hzで記録しますが、保存されたモーションファイルは結構な容量のファイルになります。
タイムラインモーションエディタ
MikuMikuDanceみたいな感じにロボットのモーションが作成できたらいいなということで、動画に同期して時間軸上にポーズを配置出来るようなモーションエディタを実装しました。
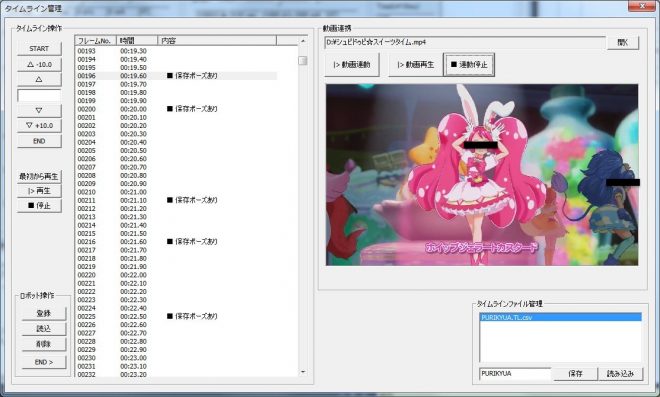
娘にウケたい一心で、プリキュアのダンスと恋ダンスのモーションを作りました。
娘も一緒にモーションづくりを手伝ってくれました。

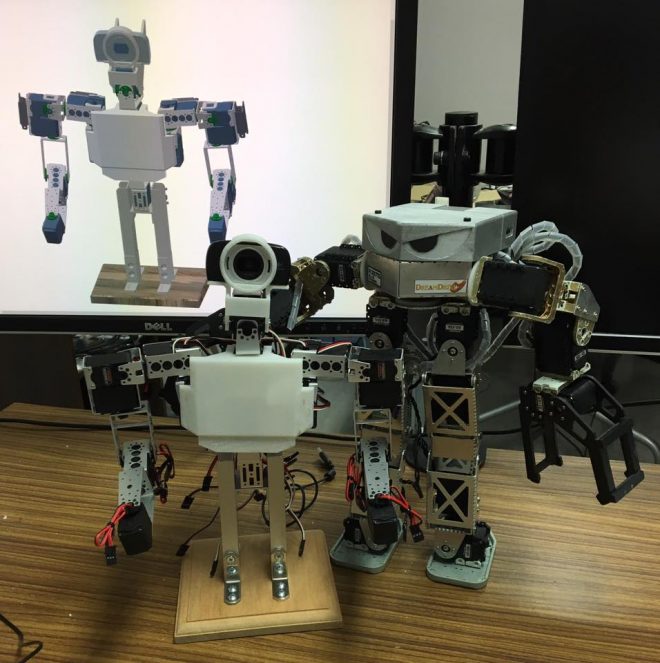
というわけで、かっこいいポーズをキメる、上半身ロボットでした。
「今後どうするんですか?」って、質問を何度もいただきましたが、・・・どうするんでしょう?(笑)