新しい上半身ロボット!
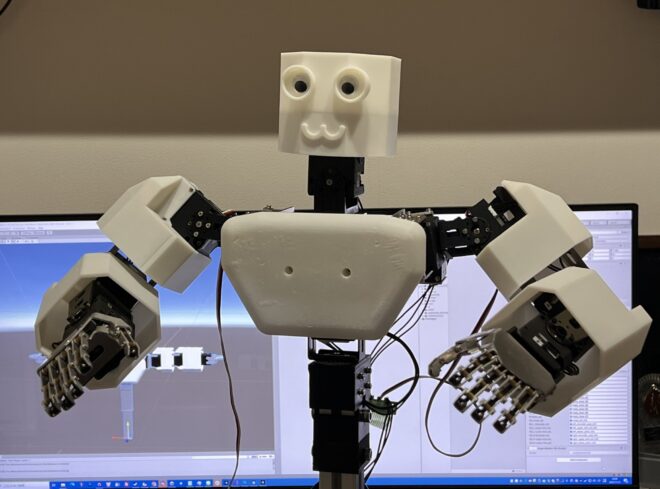
新しい上半身ロボットが出来ました!(4作目)
基本的な軸構成は、前作の24軸上半身ロボットと同じ構成なのですが、前回はコスト優先で、FUTABAの小型ロボットサーボモーターを使いました。
今回はROBOTIS社のDynamixelという強力なモーターを使い、自重負けしないパワーのある上半身になりました。腰や肩には、XM430-W350というDynamixelの430サイズの中でも一番トルクのあるモーターを採用しています。
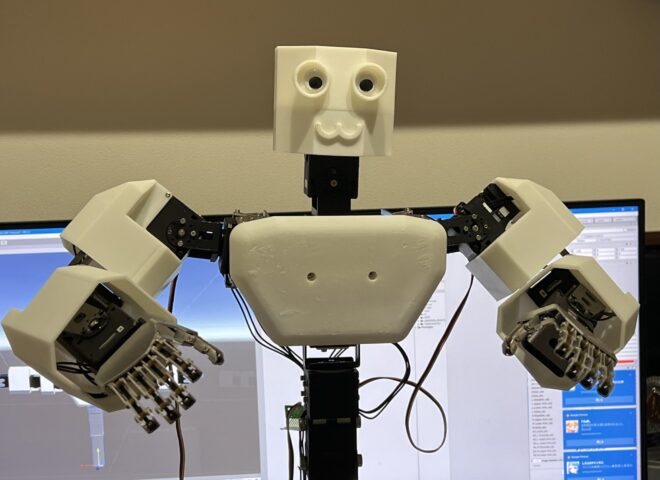
また、肩やひじ関節には、ROBOTISのDynamixelのニコイチシリーズ、XC430-W250と2XL430-W250-Tを実験的に使いました。
これは1つのサーボケースの中に2つのモーターが入っており、2つの稼働軸をもつサーボモーターです。配線の簡略化や部品点数を減らすことが出来、シンプルな見た目の中に24軸の可能軸を納めました。
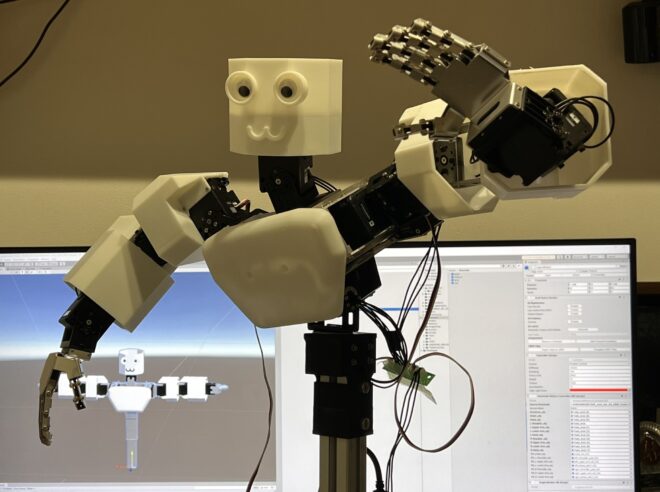
今回、上肢帯の動き使って、ロボットの人間らしい動きを表現するためにUnityというゲームエンジンの3Dの人間の動き(ヒューマノイドボーンの制御)を、ロボットに応用する試みを行っています。
Unityと連携することで、たくさんの人間の動き(アニメーション)の資産も活用できたり、コライダーを使った可動域の制御など、ゲームエンジンを活用してのロボット制御をいろいろ実験していきたいと思います。

バーチャルマーケット2023WinterとVirtual Market 2023 Real in SHIBUHARAにて、VRChatの世界と、現実世界の上半身ロボットのデジタルツインの展示を予定しております。