ファイバリオン ODrive テストツール
開発中のロボット勇者ファイバリオンに使用する予定のBLDCモータードライバODriveをテストするためのツールです。
ダウンロードとソースコードはこちら
- ダウンロード : ODriveTEST4.zip (108kB)
- ソースコード : https://github.com/dreamdrive/ODrive_TEST
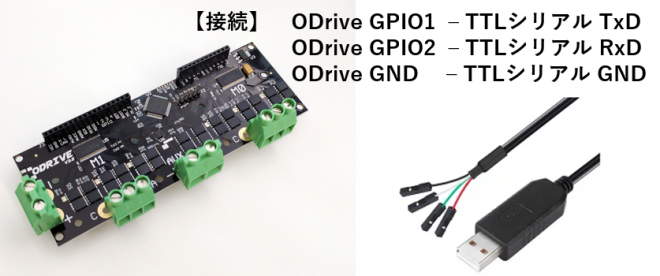
ODriveとの接続
接続は、USB-TTL変換のUSBケーブルを用いて、ODriveのGPIOのUARTに接続して使用することを想定しています。
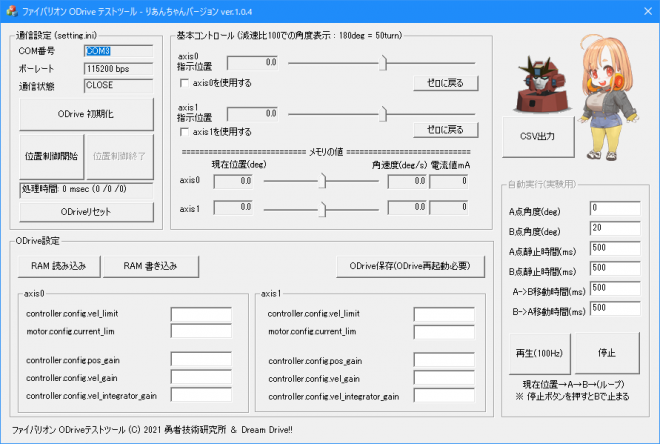
使用方法1) 基本動作
- 設定ファイル[setting.ini]にシリアルポートのCOM番号を指定します。ボーレートは標準であれば、115200から変更する必要はありません。
- ソフトウェアを起動後、BLDCモーターを接続しているポートに合わせて、「axis0を使用する」「axis1を使用する」にチェックを入れます。
- [ODrive初期化]のボタンを押すと、チェックが入っているaxisのBLDCモーターのキャリブレーションが実行され、クローズドモードで待機状態になります。
- [位置制御開始]ボタンを押すと、制御周期毎に、位置情報がODriveに送られはじめます。基本コントロール内のスライダを動かすと、BLDCモーターが回転します。減速比100の減速機を想定しているため、+180.0度でBLDCモーターが+50回転します。
- [位置制御終了]ボタンを押すと、位置情報をODriveに送るのを停止します。
注意:
[リセット]および[ODrive初期化]ボタンは、位置制御実行中には押さないでください。排他制御を実装していないので、押せてしまいますが、アプリケーションを再起動しないと状況に陥ります。(スミマセン)
使用方法2) 自動実行モード
自動的に、制御位置Aと制御位置Bを往復するモードです。
- 「使用方法1)」の位置制御実行中に、[再生(100Hz)]ボタンを押すと、[停止]を押すまでの間、
A地点静止→(A-B移動)→B地点静止→(B-A移動)→
を繰り返します。 - 移動中は、目標角度は、等速で移動するように指示します。
- それぞれの区間の実行時間をmSecにて指定できます。
実行中は値を変更しないでください。(GUIの排他制御未実装スミマセン)
使用方法3) ODrive設定
ODriveのパラメータを変更できます。
位置制御実行中には書き換えないでください。停止中のみ読み込み・書き込み可能です。
- [RAM読み込み]ボタンを押すと、現在のパラメータを読み込みます。
- ボックスの値を書き換えて[RAM書き込み]ボタンを押すと、ODriveのパラメータが書き換わります。
- ODriveを再起動すると、変更したパラメータは元に戻ってしまいますが、[ODrive保存]のボタンを押すとパラメータは本体内に記録されます。
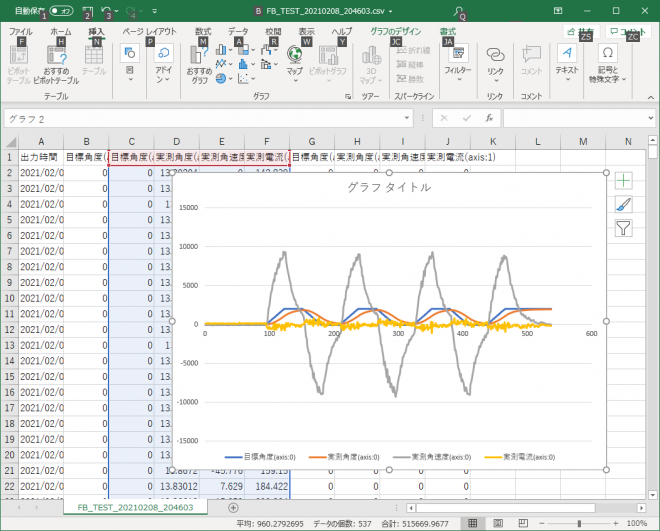
使用方法4) CSV出力
[CSV出力]ボタンを押すと、CSVで現在の値を保存します。保存する値は
- 出力時間
- 目標位置(deg)
- 現在位置(deg)
- 現在角速度(deg/s)
- 現在電流値(A)
の5つのパラメータです。
それぞれ、減速後(減速比100)の値に換算されています。
CSV形式のためエクセルにて、グラフ化が可能です。
免責・著作権等
このソフトウェアの著作権はHirokazu Onomichiにあります。
内包しているODriveArduinoのソースコードは、一部odriveroboticsに、著作権があります。このソフトウェアおよびソースコードは、MIT licenseのもと、改造・改変等自由に行うことができます。
また、このソフトウェアはテストしてありますが、作者の環境と異なる場合には正しく実行でき ない場合もあります。個人の責任において実行してください。
このソフトウェアを実行したことによって発生したいかなる損害についても、いっさい補償できませんのでご了承ください。
Copyright (c) 2021 Hiorkazu Onomichi
Released under the MIT license
https://github.com/dreamdrive/ODrive_TEST/blob/main/LICENSE