KO-Link2

スペック
- アクチュエータ1 : ROBOTIS Dynamixel AX-12 13個
- アクチュエータ2 : ROBOTIS Dynamixel AX-18A 4個
- CPU : ROBOTIS CM-5
- バッテリー : Li-Po 3セル 13.1V 2100mAh
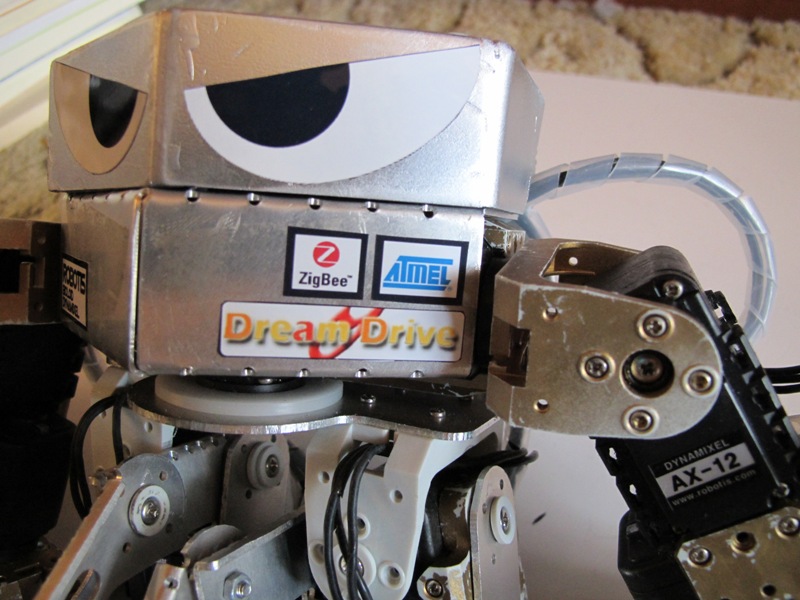
- 通信 : Zig-bee
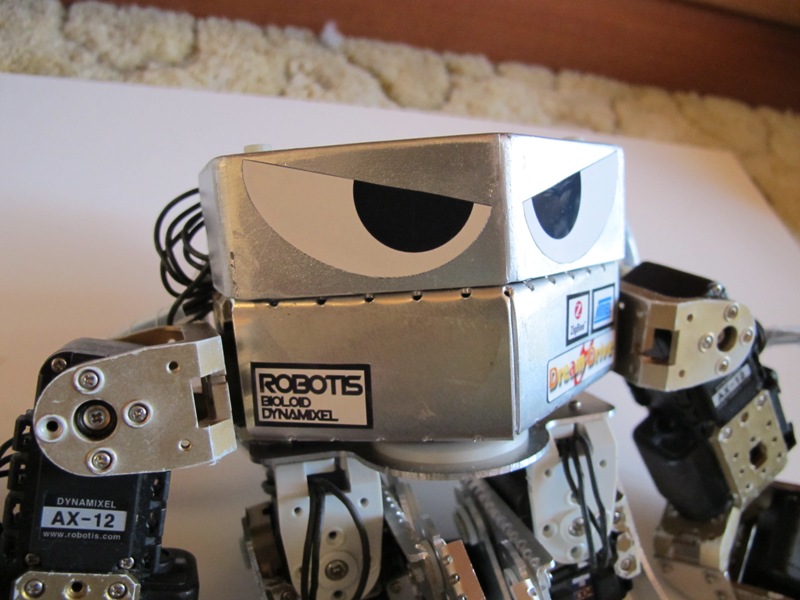

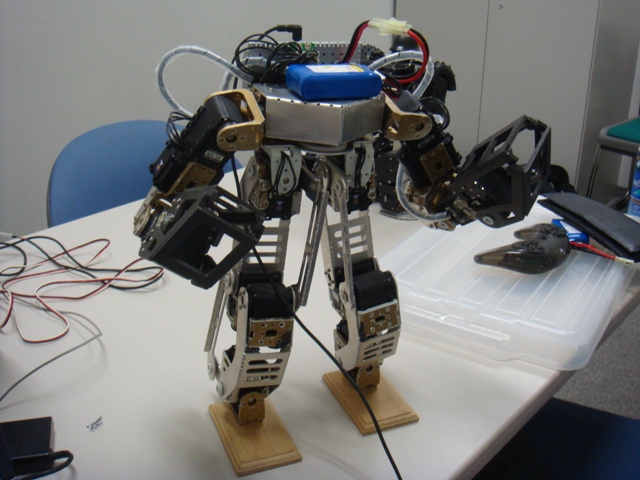
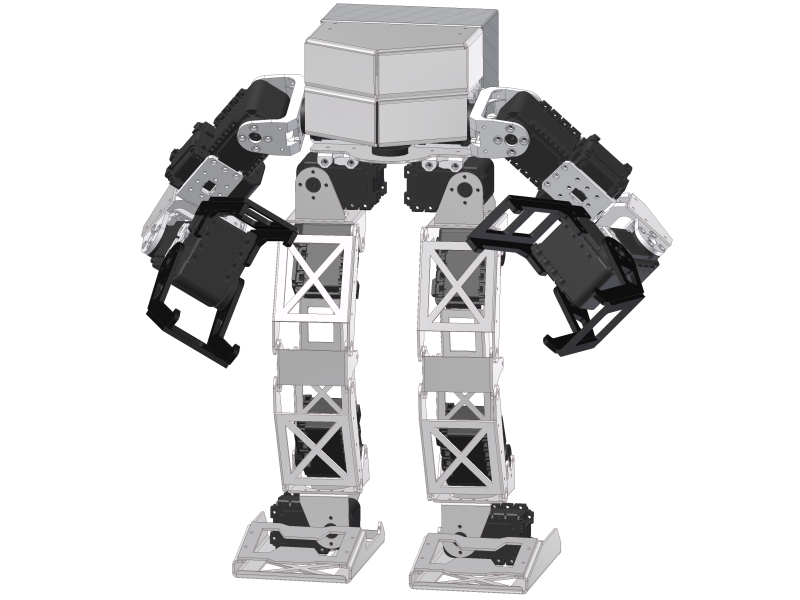
bioloidのAX-12を流用して作られた、平行リンク機構の脚を持つ、2足歩行ロボットです。
膝にダブルサーボ配置したKO-LINKと膝にサーボを配置しないKO-LINK2がいます。
上の写真はKO-LINK2ですね。また、KO-LINK2のリンク機構は399さんのフィアスのデータを頂いて改変したものです。

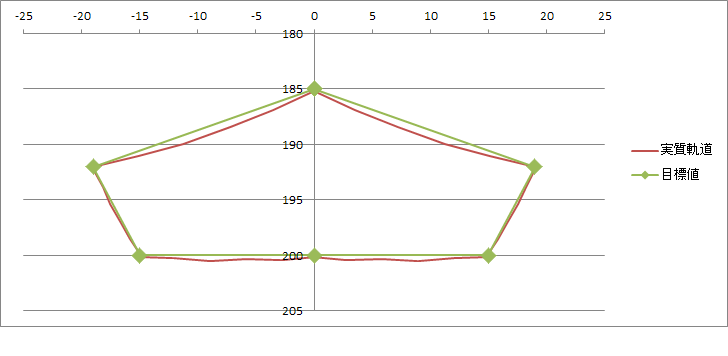
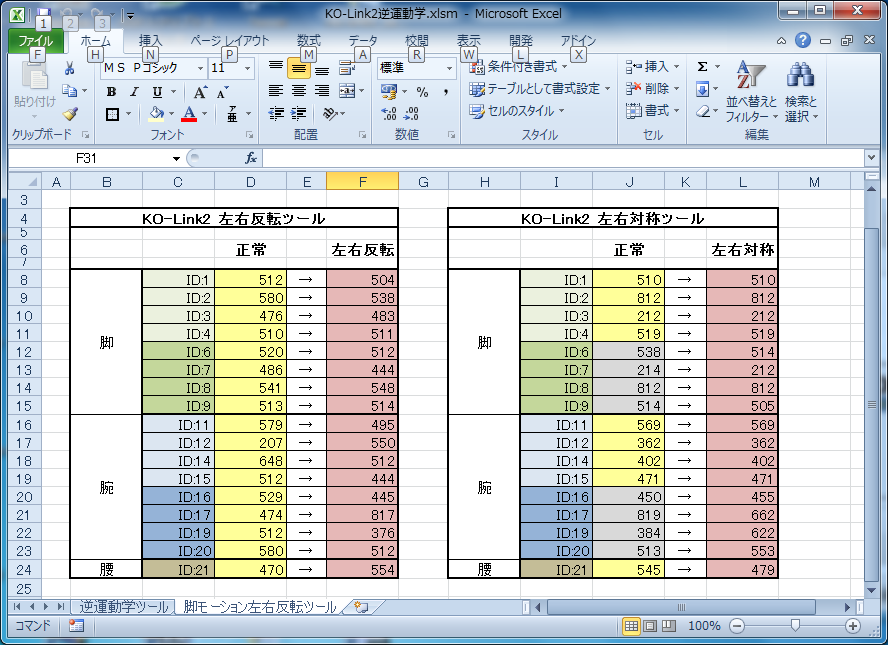
エクセルを用いた逆運動学・歩行軌道計算によるモーションスクリプト
KO-LINK2の最大の特徴は、モーションファイルをエクセルを用いた逆運動学計算シートによって、移動量のパラメータからモーションファイルを自動生成する点です。
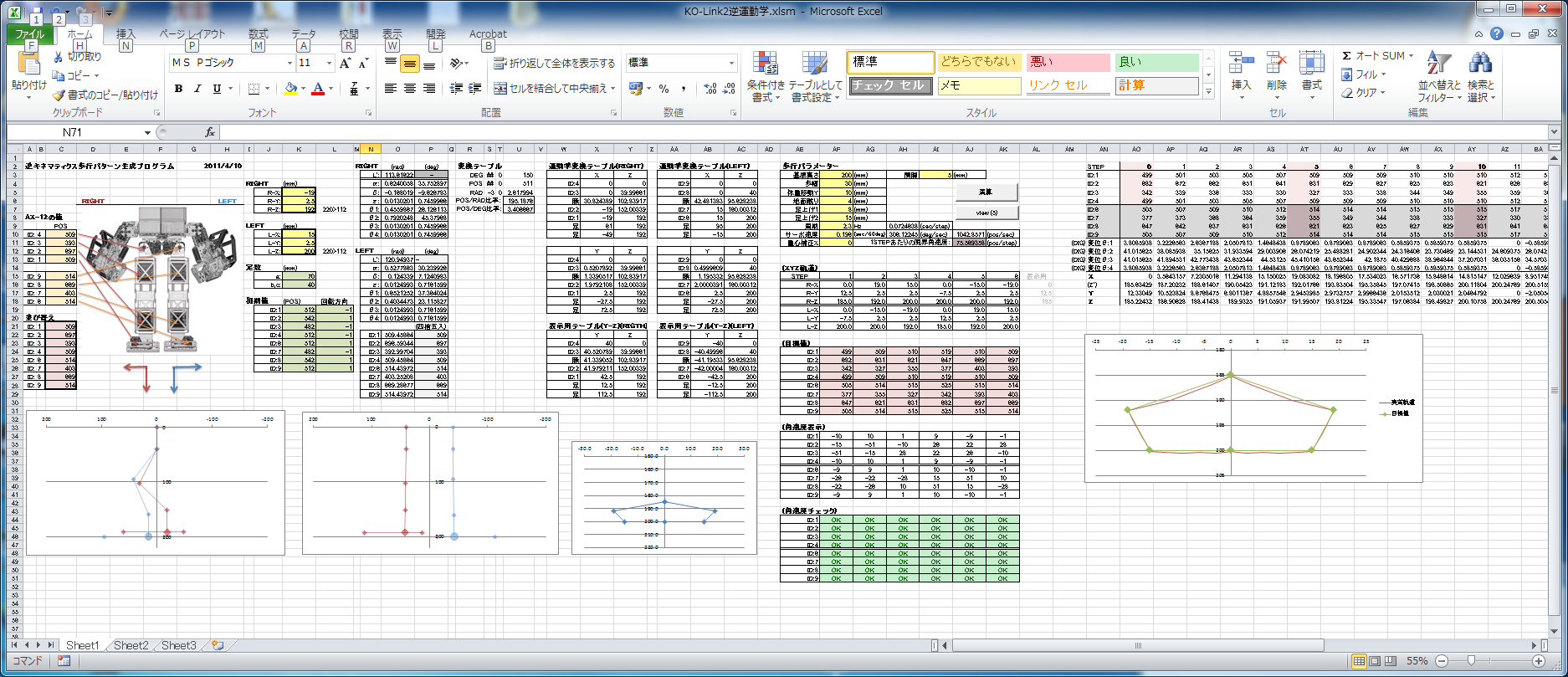
五角形の歩容(足先軌道)のパラメータを移動量から求め、CM-5用のモーションフィアルを生成します。
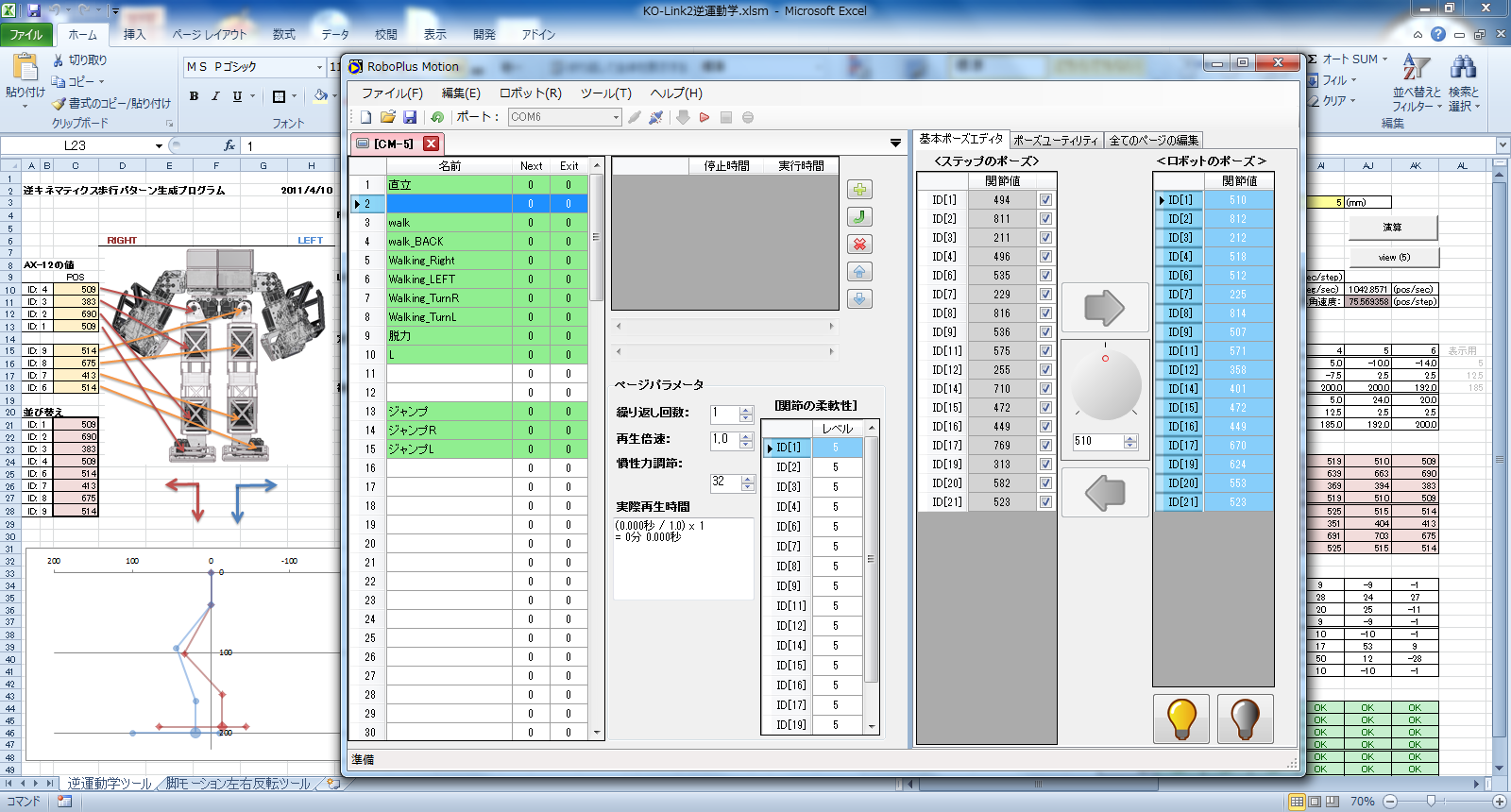
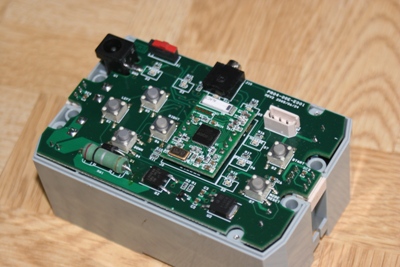
マイコン
BioloidのCM-5から、ニッケル水素バッテリーの格納部分をカットし、小型化して使用しています。
モーションはBioloid用のRoboPlusなど、Excelと組み合わせてハイブリッドに使用しています。

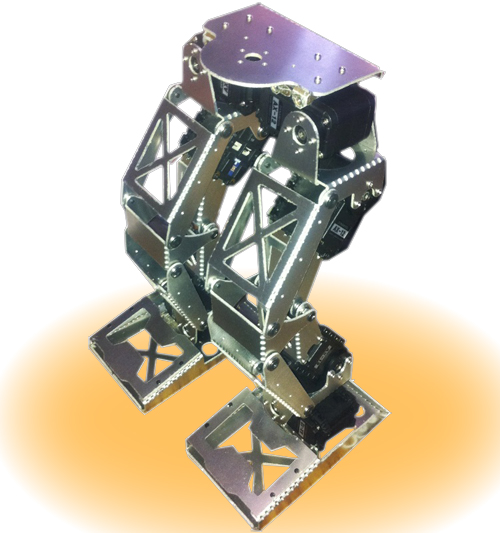
KO-LINK1

KO-LINK1は、平行リンクの実験機として作りました。
通常、非リンクの二足歩行ロボットはどうしても膝にかかるモーメントで後方に反った体勢になりがちです。
ただし、平行リンク機構の場合は、モーターのトルクがモーメントに負けても機構上の制約で縦に潰れます。
前後の重心に影響を与えないためとても有効でないかと思い設計しました。


ただし、このモーター配置には、大きな欠点がありました。
平行リンクに使用するモーターを膝に使用したことにより、屈伸時に前後する膝ユニットの質量が大きくなり、結果として屈伸のたびに重心が前後に振られるという新しい問題を浮き彫りにしました。
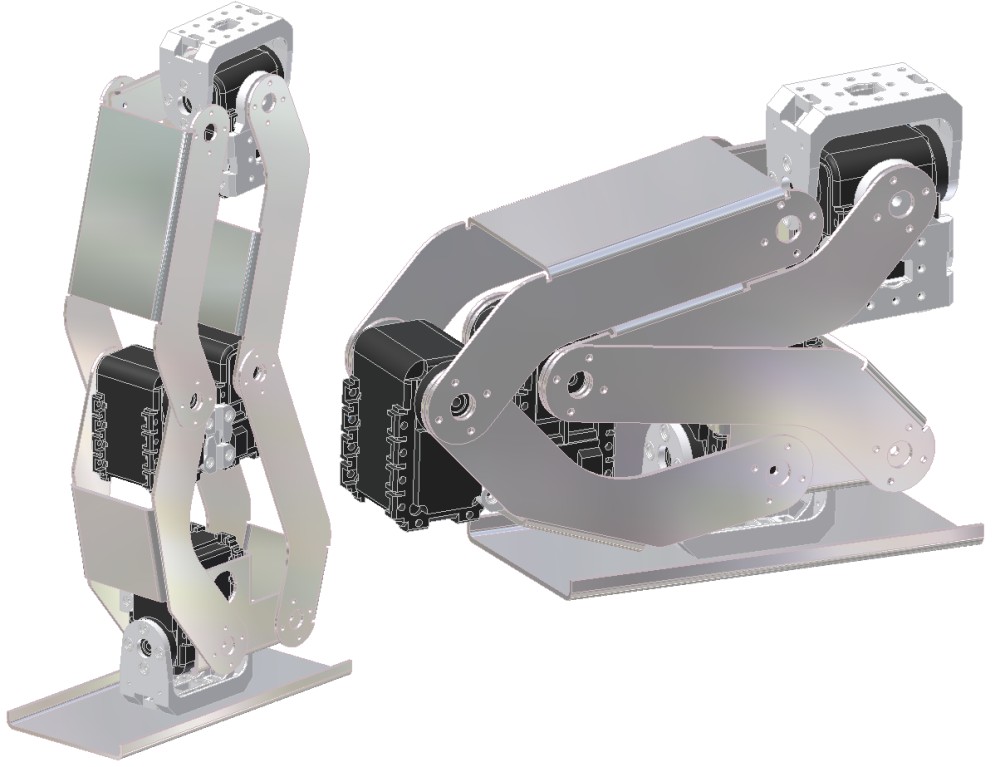
KO-LINK2メカニカル
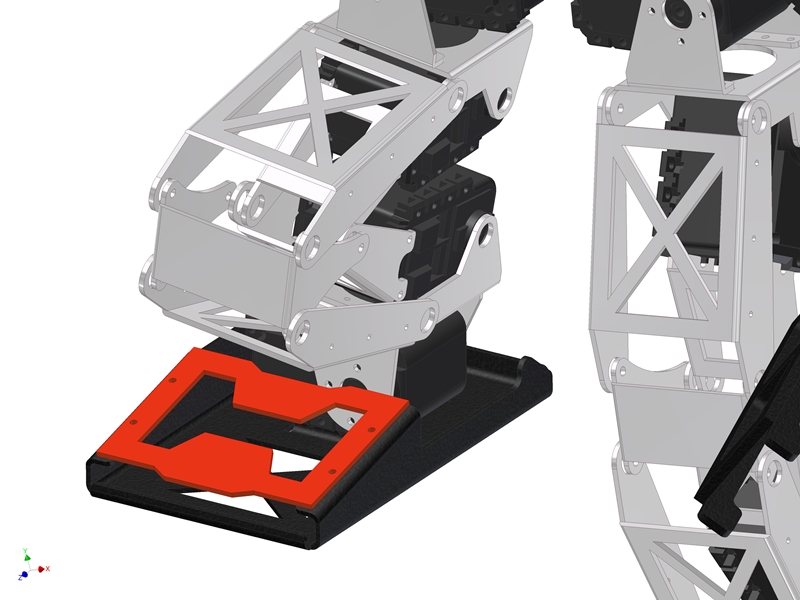
KO-LINK2は、KO-LINKの抱える、膝の重心の問題を解決しました。
また、KO-LINKで拘っていた直交軸を廃止しました。
直交軸は、逆運動学の計算量を減らすことが出来ますが、その分膝のピッチ軸間の距離が長くなるという問題があります。
これはトルクの小さいサーボには致命的です。
計算量は増えますが、とてもバランスの良い足回りに進化しました。
設計のベースはほぼ、399さんのフィアスが元になっています。