直交3軸とつま先
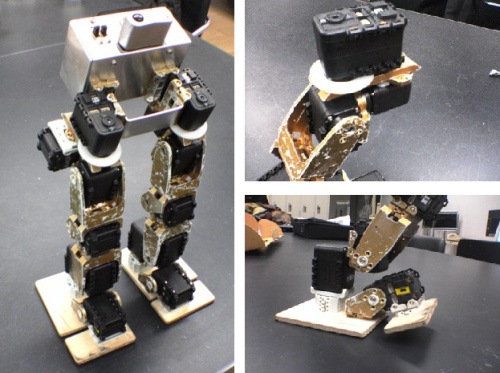
新しい制御ができる形として、片足7軸の、つま先付の足を組み上げました。
まだ、配線はしていませんが、とりあえず歩行を突き詰めたいので胴体がないのは仕様です。
直交3軸は微妙にヨー軸が少し中心を外していますが、とりあえずこれで、ヨー軸の計算の確かめをしてみようと思います。
そして、今回初めての試みであるつま先。
たまにつま先がついているロボットを見ることがありますが、まだあんまり制御しているロボットを見ることはありませんね。
そういえば、7回ROBO-ONEのとき、ARIUSがつま先を使って階段を登ってたのには感動した記憶があります。
とりあえず、自由に動けるつま先ということで、いろいろ試して見たいと思います。
そして作ってみて気づいたことですが、つま先を制御するのにはヨー軸は必ず必要だということです。
かかとを上げたとき、ロール軸にヨー軸の要素が加わるので、修正するためにはどうしてもヨー軸の制御が必要になります。
こんなことも、作って動かしてみて初めて分かりました。
時間がなかなか取れませんが、少しずついじってみて何を発見できるか楽しみです。
コメントを残す