KO-Link2の逆キネ計算歩行軌道の考察 #04
逆運動学で歩行する場合の軌道が”五角形でいいのか”という疑問はそのまま置いておいて。
五角形の軌道を通る場合ポーズ数の分割は6分割でいいのかということを実際に確認するため、エクセルシートをさらに改造して実際に取りうる軌道を表示するグラフを作ってみました。
その結果がコレ。
6ポーズの場合。

5ポーズの場合。
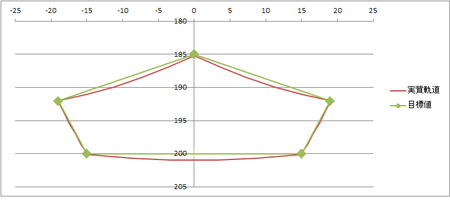
結局ズレの部分が、分割数(計算量)を増やした場合のパラパラ漫画に対する逆運動学の優位を表すと考えられるのですが、5ポーズだとちょっとズレすぎかな(それでも1mm程度ですが)
7ポーズ以上に増やせばもっと五角形に近づきますが、実際外乱でそううまくいかないことも考慮に入れれば、6ポーズで十分使える事が分かるかと思います。(歩けた後に言うのもなんですが)
あとはこの計算をリアルタイムで行って、アナログスティックから歩幅を指示みたいなことができたらベストなんですけど、マイコンをC言語で書く元気は全然ないので、とりあえず、エクセルVBAでのロボット制御を勉強中です。
コメントを残す