RPU-10で秋月ジャイロセンサ #01
ロボットの姿勢制御のセンサといえば、定番は加速度センサとジャイロセンサです。
RPU-10には加速度センサ が内蔵されているのですが、秋月に村田製作所のジャイロが400円で出ていたので、思わず購入してみました。

サイズは13mm×14mmと、すごく小さいです。
G-ROBOTSの股のところにすっぽり収まりました。
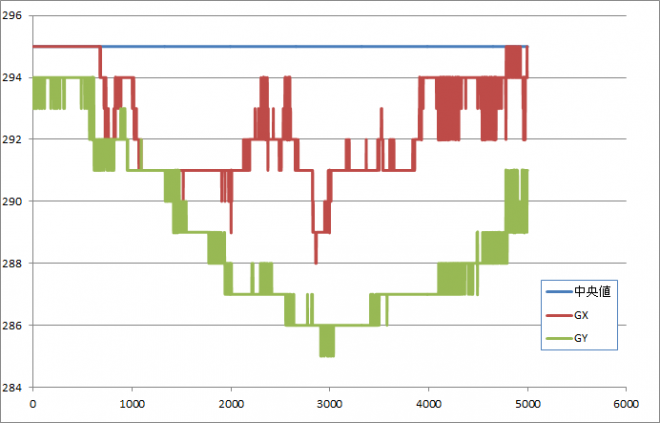
とりあえず、どんな値が取れるのか、加速度センサと一緒に取り込んでみました。
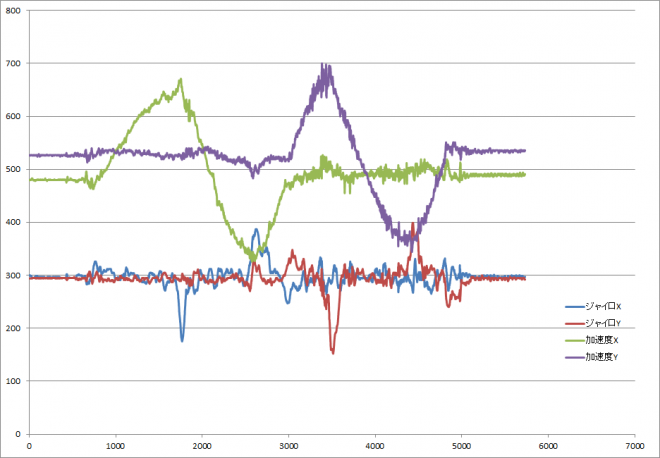
どうも動作の変わり目にエッジが立つようなので、秋月ジャイロは角速度センサではなく角加速度センサのようです。
というわけで、2回積分してみます。
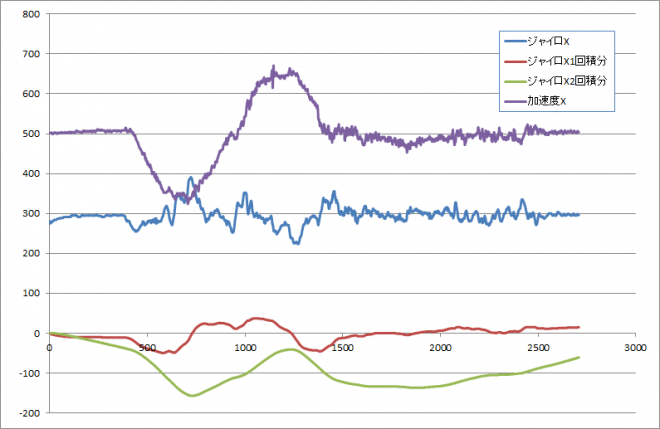
だいたい、加速度センサの値によく似た形になりますね。
ただ、積分を2回もすると積分誤差とドリフトで、とてもじゃないけど使い物にならなさそう(^^;A
…というわけで、この秋月ジャイロの特性をもう少し知るために追加実験をしてみました。
まず、起動してしばらく触らずに値を取り続けてみます。
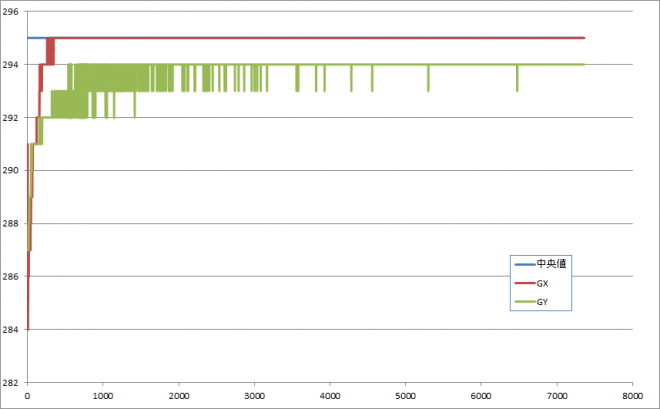
どうも値が安定するまで起動から数秒ほどかかるようです。
再起動するとやはり同じくらい時間がかかるので、フィルタ回路の影響でしょうか。
2回積分したときにマイナス方向に振れているのはこのせいですね。
次に、温度ドリフトを見てみます。
値がある程度安定したところでドライヤーを当ててみました。
このグラフはずっとドライヤーを当て続けているのですが、一度ガクっと落ちた後、じんわり値が戻っています。
フィルタが効いているのでしょうか。
…というわけで、このジャイロを使いこなすにはいろいろ工夫が必要そうですね。
とりあえず、外部からの積分リセット機能を付けてみて、改めて2回積分の誤差を見てみたいと思います。
秋月ジャイロ、安さで飛びつきましたが、やはり近藤科学のKRGシリーズの方が便利です(結論w)
コメントを残す