上肢帯のあるロボット3
先週1週間の進捗です。
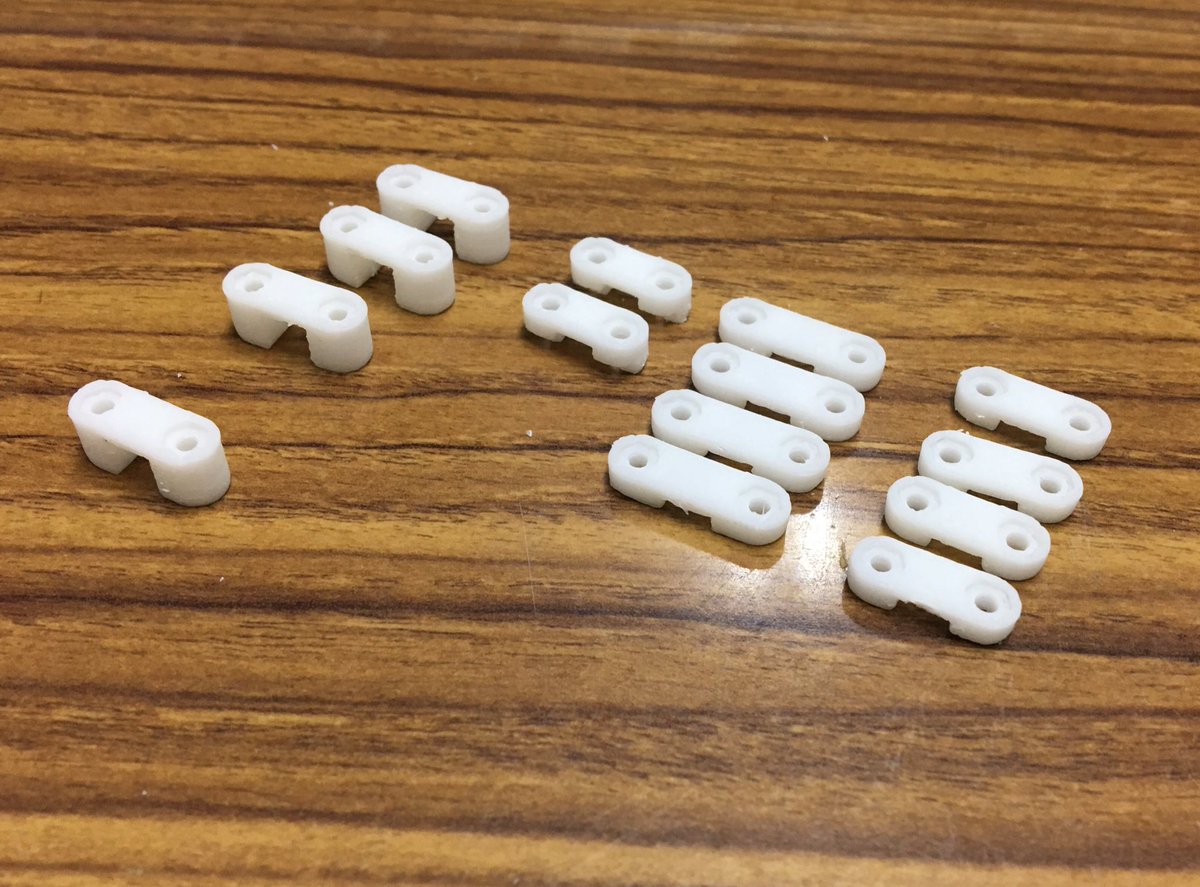
仮組みまで完了していたので、次は配線ですが、RS306サーボを接続するにあたって、”連結ハブ”と”直結ハブ”を自作しました。
おそらくサーボの3ピンのコネクタ部分が多いとTTLの通信のノイズになると思うんですよね。


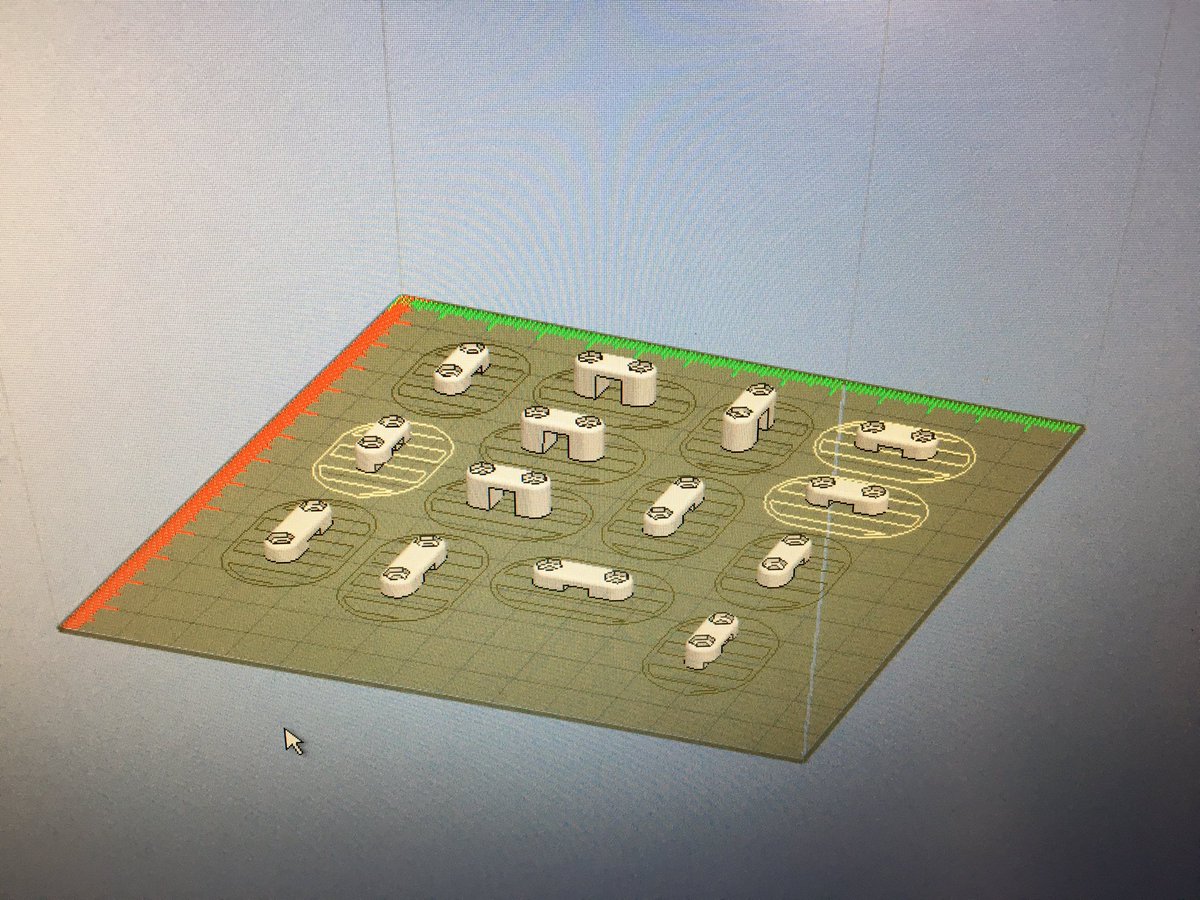
さらに配線に関して、少しでもまとめるために、配線の固定用の留め具を自作。
将来的には、配線埋め込みでボディをすべてプリントし直したいですが、とりあえずはブラケットでなるべくまとめて配線します。
穴位置とケーブルの本数の組み合わせで、5種類作りました。
3Dプリンタでジャストサイズで作っているので気持ちいいですね。

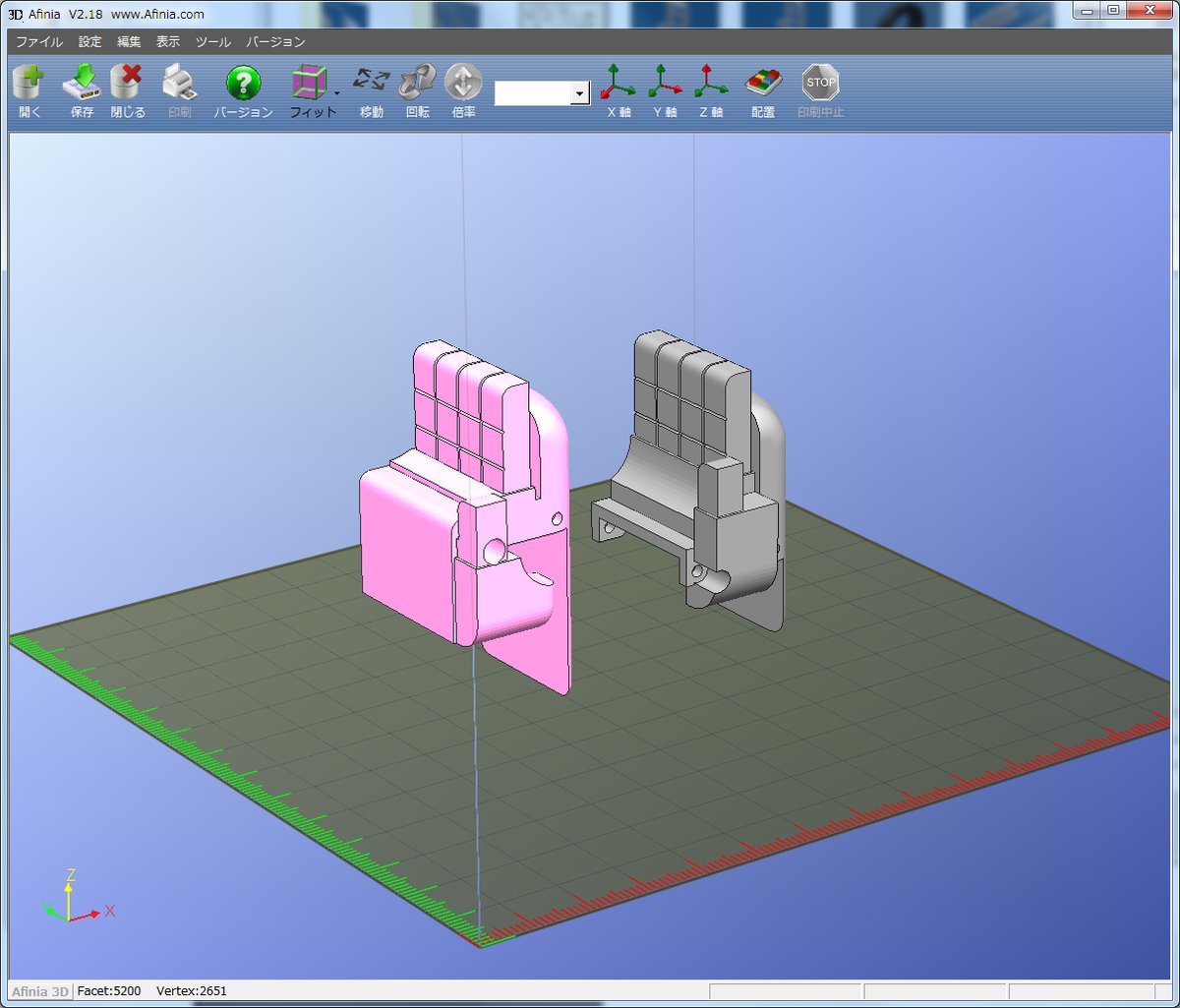
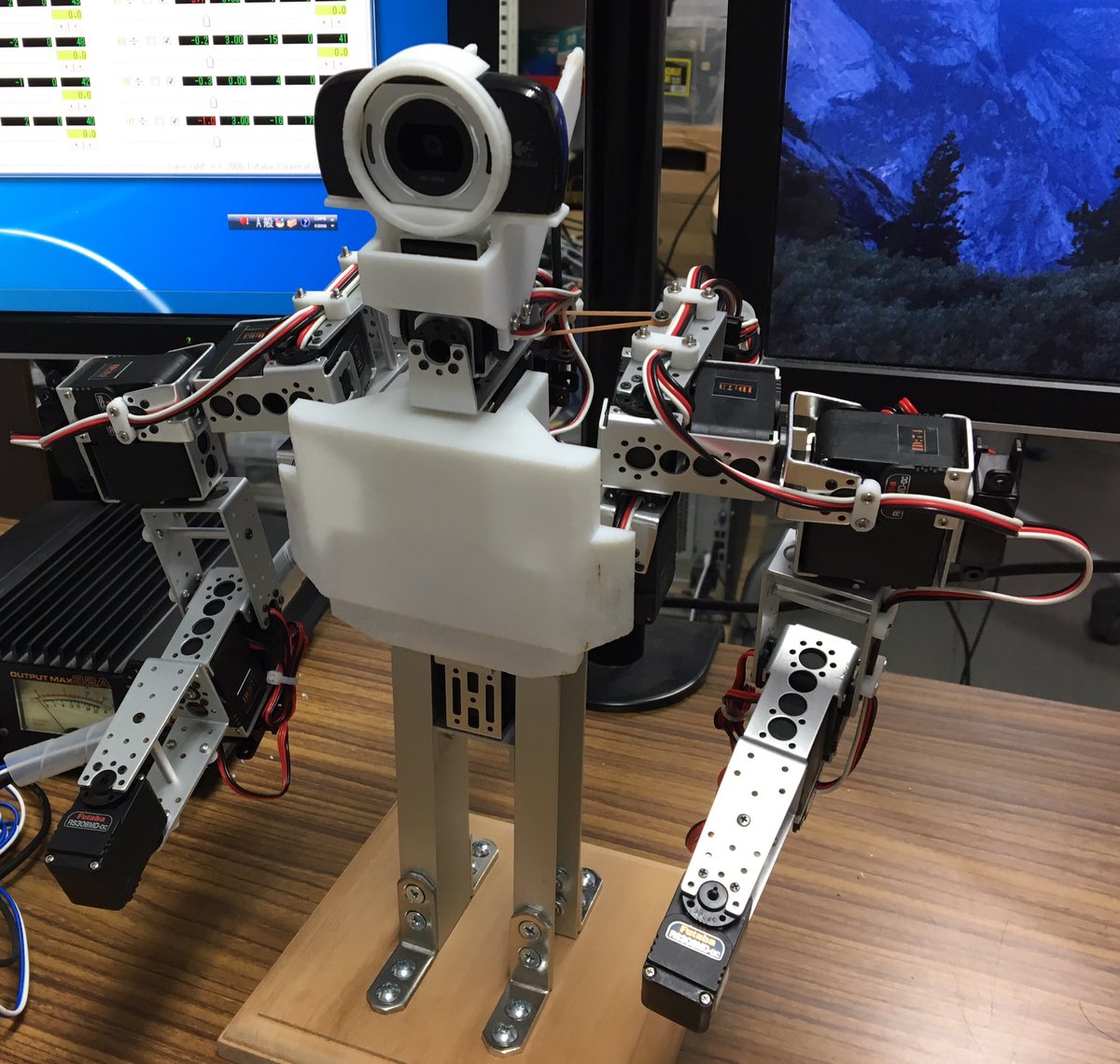
手に関しては、あくまで”飾り”ですが、あると表現力が違ってくる(ハズ)なので、なるべくサーボのピッチ軸が手首に見えるよう作成。
なかなかしっくりこなくて、なんだかんだで2度作り直しました。
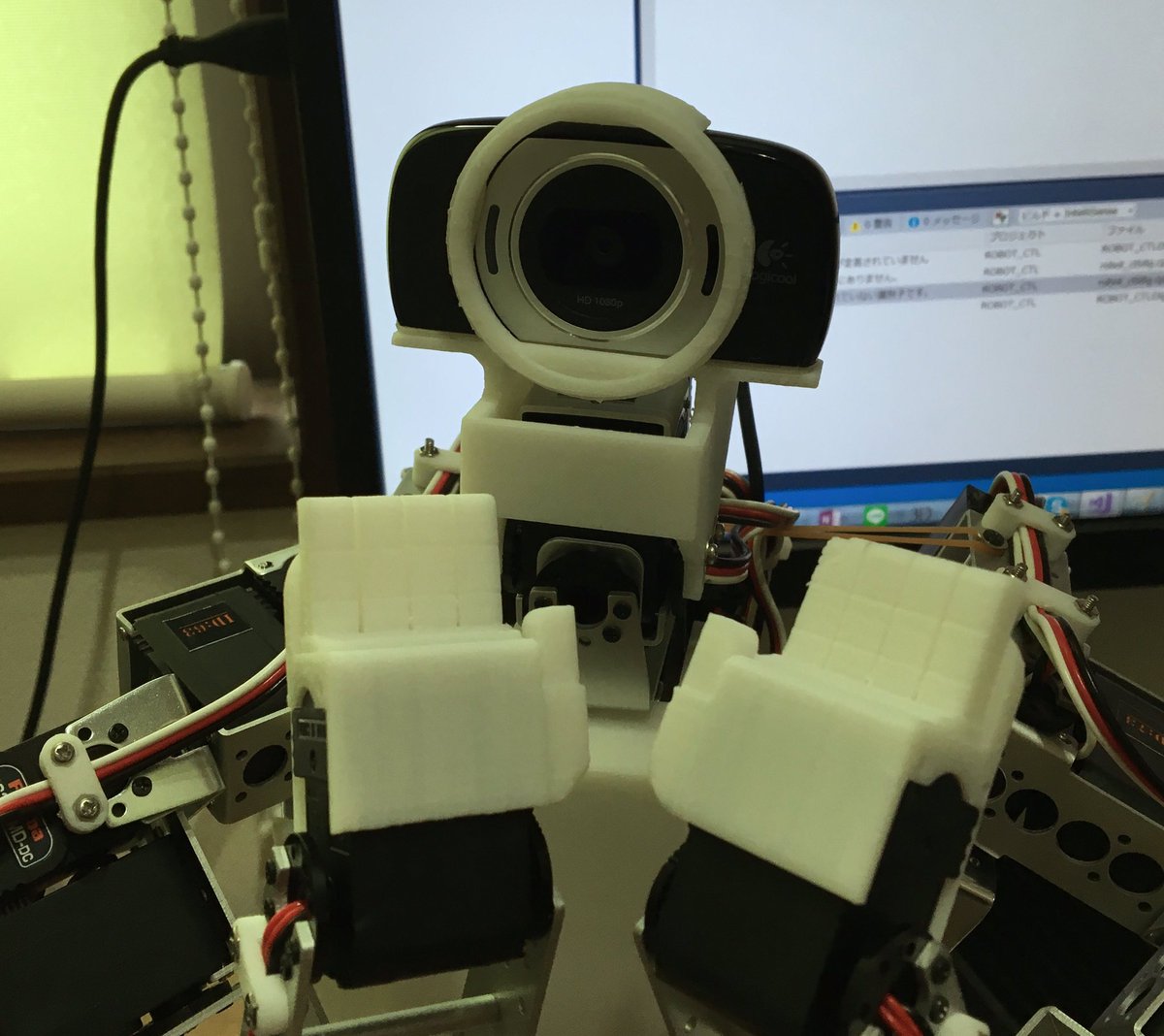
一通り配線し終えて、こんな感じです。
とりあえずの火入れに関しては、双葉のHSPサンプルを使用しました。
で、HSPも好きなので、双葉のサンプルを改造するか、今回もExcel VBAを極めるか考えたのですが、
今回はVisual Studioで作りたいと思います。
とりあえず、双葉のC言語用のサンプルを組み込んで、トルクオン・オフのみ出来るソフトを作成。

とりあえず、ポージングが出来るようになりました。
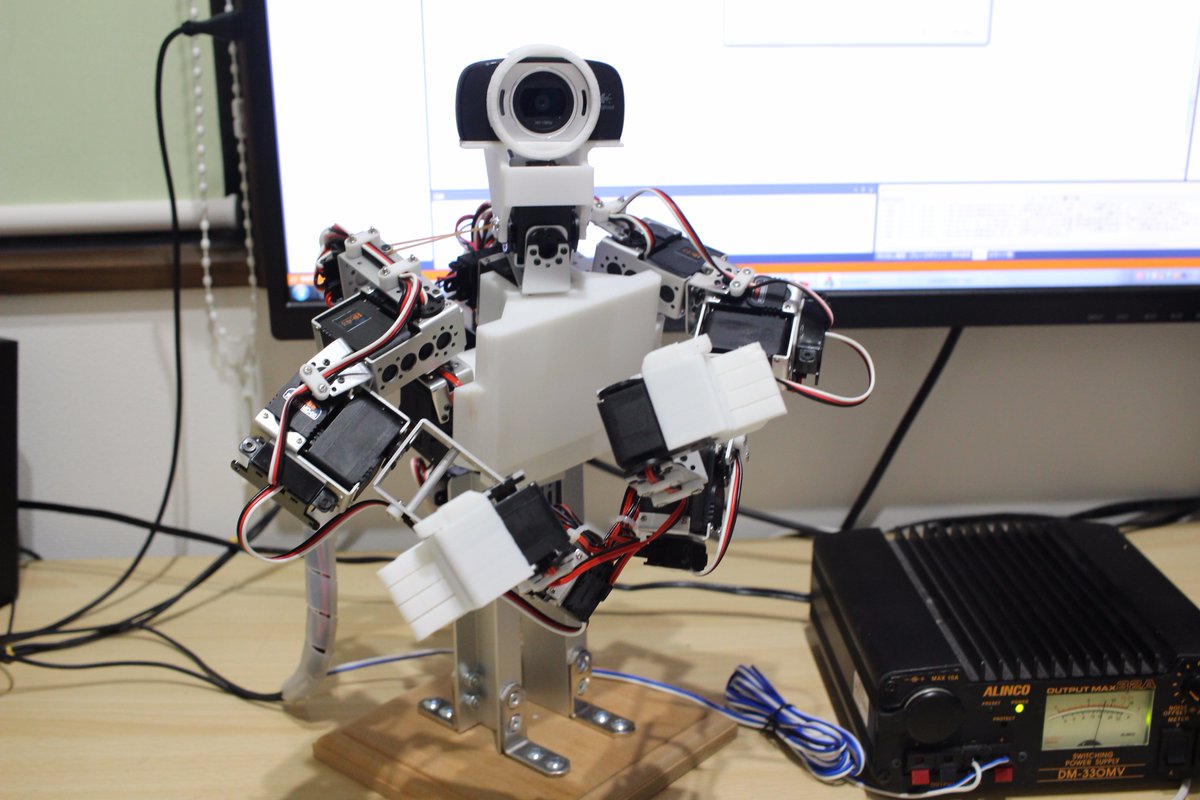
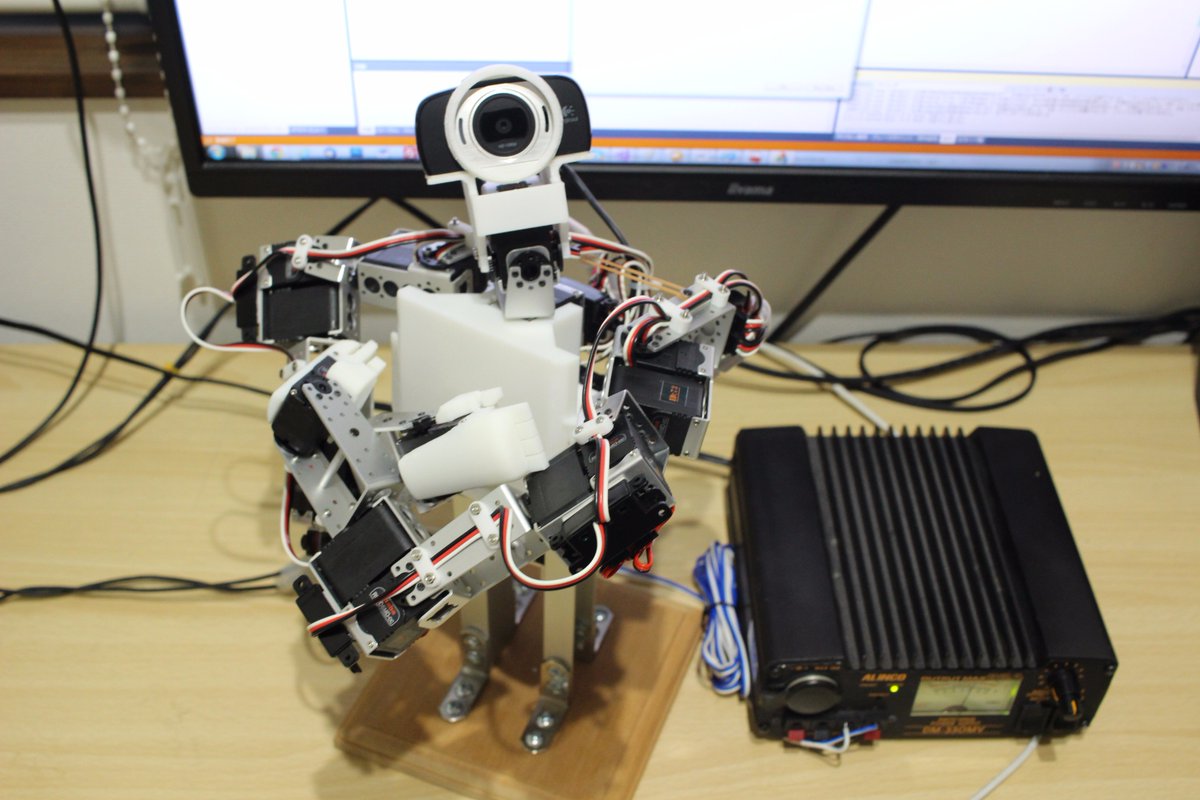
やっぱり、サーボ数が多いと出来るポーズも違いますね。
というわけで、次週はプログラムを進めていきます。
コメントを残す