上肢帯のあるロボット7
ちょっと間が空きましたが、上肢帯のあるロボットの続きです。
頭部にカメラを搭載しているので、”OpenCVを用いた○○”とか、”ROSを用いた○○”とか、いろいろロボットらしい課題はあるのですが…
この1か月は、あえてモーションのところだけを掘り下げていろいろやってみました。
前回の最後で少し触れたのですが、
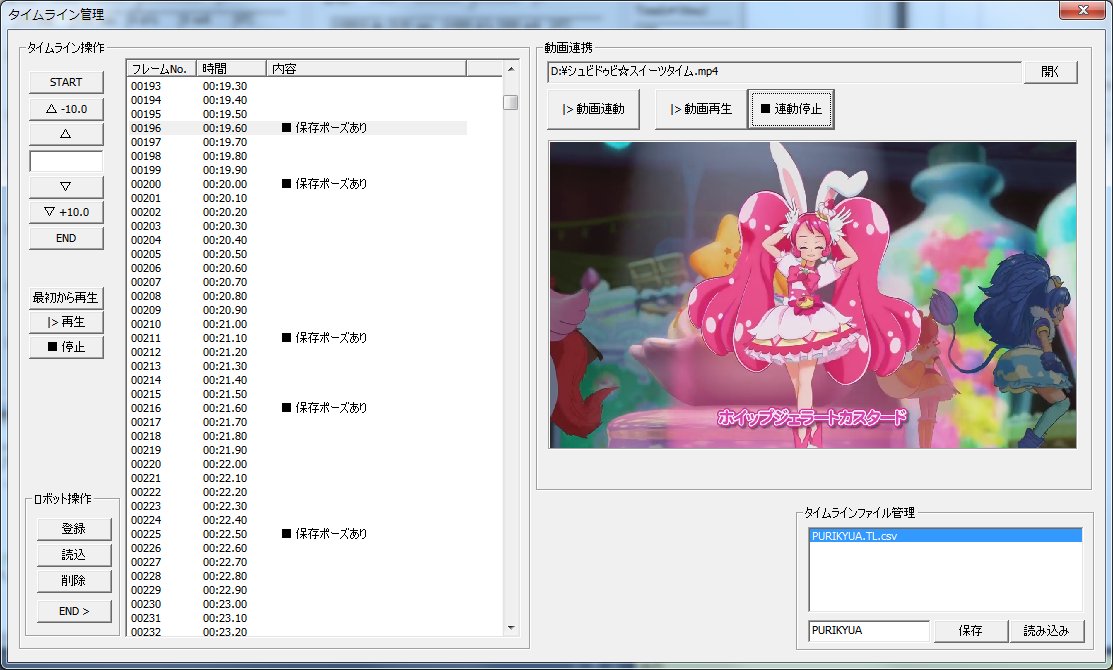
ポーズ間の補完をマイコンのCPUのクロックに合わせた実行時間で指示する方式だと、「踊ってみた」的な音楽や動画などのマルチメディアと同期する形でのモーションはなかなか難しいため、タイムラインを用いてモーションを実行する形式で、モーションエディタを作ることにしました。
ロボットの制御ウィンドウはそのままに、タイムライン上でモーション管理するウィンドウを用意しました。
じゃん!

実際のモーション作成には同時に、AviUtilも立ち上げることになるので、
2560×1440のモニター、もしくはフルハイビジョンのマルチモニタが必須というトンデモ仕様です(汗
ちなみに、縦軸が実時間で、任意のフレーム数で、動画のフレームに合わせてキーモーションを貼り付けて行けます。
これは3Dモデルを躍らせるので有名なMikuMikuDanceで、3Dキャラクタのボーンを編集してキーモーションを貼り付けていくやり方を真似ています。
(本当は時間軸を横に取って、UIもそのままMikuMikuDdanceを取り入れたかったのですが、力不足でしたorz)
ちなみにですが、モーションのフレーム数は可変にしています。
動画って30FPSだったり、29.97FPSだったり、25FPSだったりいろいろなので…。
そこは、サーボ制御のスレッドと、モーション再生のスレッドを分けているので、周期が違ってもへっちゃらです。
また、まだ実装出来ていませんが、”補完曲線動作”の機能も実装するつもりにはしています。
で、試しに作ったダンスモーションがこちら・・・
第1弾 キラキラ☆プリキュアアラモード(イントロのみ)

第2弾 恋ダンス(イントロのみ)

恋ダンスの方が、後から作った分、それなりに動くようになってると思います。
そして、腰のサーボのトルク不足が顕著ですね。
コメントを残す