四足歩行ロボとリハビリ
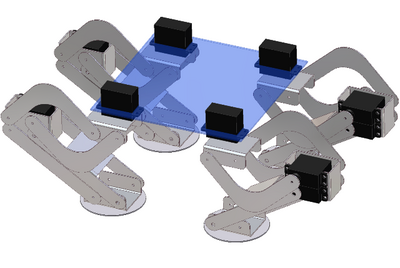
研究室の仲間が四足歩行の研究をしているのですが、僕ならこんな足を作ってみようか・・・と思って、レスコンが終わってからまったくいじってなかったインベンターのリハビリも兼ねてアイディアを書いてみた。
接続部はネジも使わず空中で拘束ww
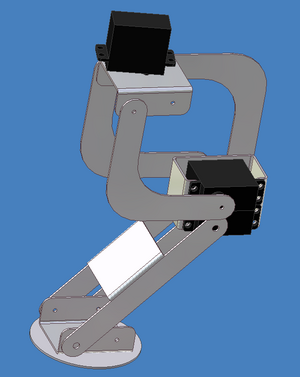
機構だけは二足歩行にも使ってみたいと思っていた平行リンクを4足用の足に用いてみた。
● 書いてみての結論。
ラフスケッチすらなしで、寸法の決まっていない図面を想像で形にしていく作業は思った以上に大変だった。
● 独り言
あと、KONDOのサーボのCADデータとかどっかに落ちてないですか?
コメントを残す