KO-Link 2
VS-RC003でROBOTIS Dynamixelを制御する#05

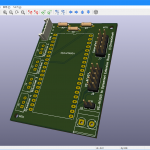
seeed社のFusionPCBに外注していたVS-RC003とDynamixelを中継する基板、製作が終わって発送されてきました。 seeed社の工場移転が重なったそうで、製作に時間がかかり、それから発送予定より1日遅 […]
VS-RC003でROBOTIS Dynamixelを制御する#03
なんとなく出来そうだったのではじめてみた、VS-RC003でDynamixelを動かす基板作りですが、一つの目標としてVS-RC003でKO-Link2Sを動かせるところまで走り切ってみようと思います。 KO-Linkに […]
VS-RC003でROBOTIS Dynamixelを制御する#02
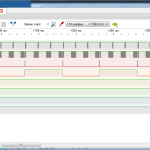
前回、気になっていた、「もう少し高速化する余地があるのか!?」ですが、ロジアナで客観的に見てみました。 なんだか隙間が結構ありますね。 これは、まだ改良の余地がある・・・のか!? D0(OpenCM)とD1(VS-RC0 […]
VS-RC003でROBOTIS Dynamixelを制御する#01

先日のPCから制御するVS-RC003に引き続き、VS-RC003のネタです。 本来、VS-RC003は、PWMのサーボモーターか、シリアルサーボに関してはVstone(自社)のVサーボしか対応していないのですが、コマン […]
KO-Link2Sについて(OpenCM用PS2 Shieldライブラリ公開)

※ 本記事内でOpenCM 9.0.4用のCytron PS2 Shield用ライブラリを公開しています。 第30回ROBO-ONEに出場したKO-Link2Sのロボットの今回改良したポイントの紹介と、次回の課題を考えま […]
第30回 ROBO-ONE出場しました

久々にROBO-ONE参加してきました。 結果は、予選敗退orz 転んだ拍子に、まさかのファクトリーリセット、足首のサーボのIDが1に書き換わってしまうという事故が起こりました。 399さんと会うのも久々、KO-Link […]
KO-Linkの肩の直交軸

しばらく前にFaceBookには投稿していたのだけれど、改めてブログに。 KO-Linkの肩の軸を再検討中。 逆運動学のためには最低2軸直交していれば、位置の制御的にはOKなのだけど、手の制御の場合、脚の制御以上に”機能 […]
KO-Link2とエクセル逆運動学 #05
ロボゴング14から後、モチベーションが上がっていたので、エクセル逆運動学を進めてみました。 KO-Link2の構成も腕のサーボを1つ取り払った上で肩周りの構成を見直しました。 肩のピッチ軸を腕側でなく胴体側に設置しました […]
KO-Link2の逆キネ計算歩行軌道の考察 #04
逆運動学で歩行する場合の軌道が”五角形でいいのか”という疑問はそのまま置いておいて。 五角形の軌道を通る場合ポーズ数の分割は6分割でいいのかということを実際に確認するため、エクセルシートをさらに改造して実際に取りうる軌道 […]
KO-Link2の逆キネ計算歩行完成 #03
さらに進化を進めて 歩行軌道の生成 軌道座標からサーボの目標ポジションの演算 角速度の上限値チェック を実装し、一通り歩行のモーションを出力できるようにしました。 軌道に関しては、「五角形軌道」を採用しました。 歩行軌道 […]