KO-Link2とエクセル逆運動学 #05
ロボゴング14から後、モチベーションが上がっていたので、エクセル逆運動学を進めてみました。
KO-Link2の構成も腕のサーボを1つ取り払った上で肩周りの構成を見直しました。
肩のピッチ軸を腕側でなく胴体側に設置しました。
腕の重量を減らすには効果大でした。

エクセル逆運動学のエクセルシートから制御ソフトの「Robot Plus モーションエディタ」にコピペでモーションが貼り付けられます。
列単位でコピペが出来ることに今さら気が付いたのですが、「パラメーターを打ち込んで、出来上がった動作データをエディタに簡単6回コピペ」の簡単な操作で動作の再生試行が行えます。
結構、簡単に試行錯誤できるので便利になりました。
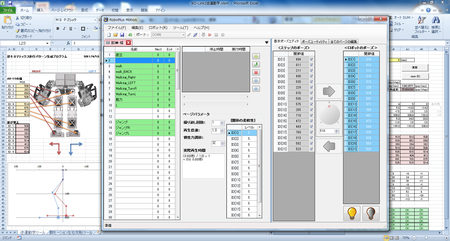
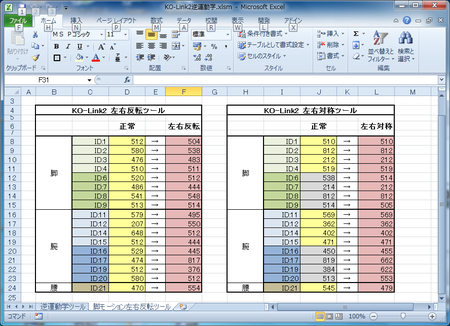
あと、Robobie Maker等では標準の機能なのですが、「左右反転」と「左右対称」のポーズエディタもエクセルで実装しました。
オリジナルロボットな上にエディタにその機能が無かったので今まで奮闘していたのですが、もともとの教示機能と組み合わせるとかなり簡単にダンスモーション等々が作れるようになりました。
というわけで、これらの新機能を利用して改めて作成したモーションを動画にしてみました。
「後退」がまだパラメータの見直しが必要そうですが、移動系は充実してきました。
さてさて、ベストテクノロジーのサイトを見ていたらAX-18Aなるサーボが発売になっていました。
BTX032 Dynamixel AX-18A

AX-12Aと特徴を比較すると下の通り
- AX-18A → 0.103(sec/60度) 18kgf・cm(12V 1.5A) アルミ4番ギア
- AX-12A → 0.169(sec/60度) 15kgf・cm(12V 2.2A) プラスチック4番ギア
スピードの進化半端ないですね。トルクもアップした上で、今まで問題だったファイナルギアが、エンジニアリングプラスチックでなくアルミギアになっているのも素晴らしいと思いました。
思わず評価用に1つだけ注文してしまいました。後日レビューしたいと思います。
AX-12Aも自分が購入したころのAX-12よりスペックが少し上がった上で値下がりして、更にコストパフォーマンスの良いサーボになっています。
二足歩行だけにとどまらず”ロボット用サーボ”として、素敵なサーボですね。
コメントを残す