VS-RC003でROBOTIS Dynamixelを制御する#02
前回、気になっていた、「もう少し高速化する余地があるのか!?」ですが、ロジアナで客観的に見てみました。
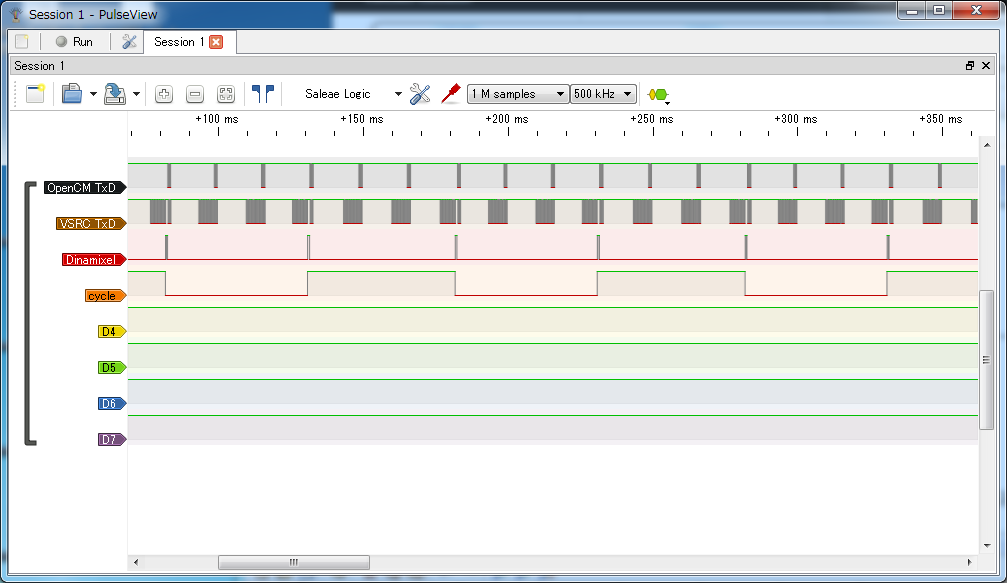
なんだか隙間が結構ありますね。
これは、まだ改良の余地がある・・・のか!?
D0(OpenCM)とD1(VS-RC003)だけ、拡大してみます。
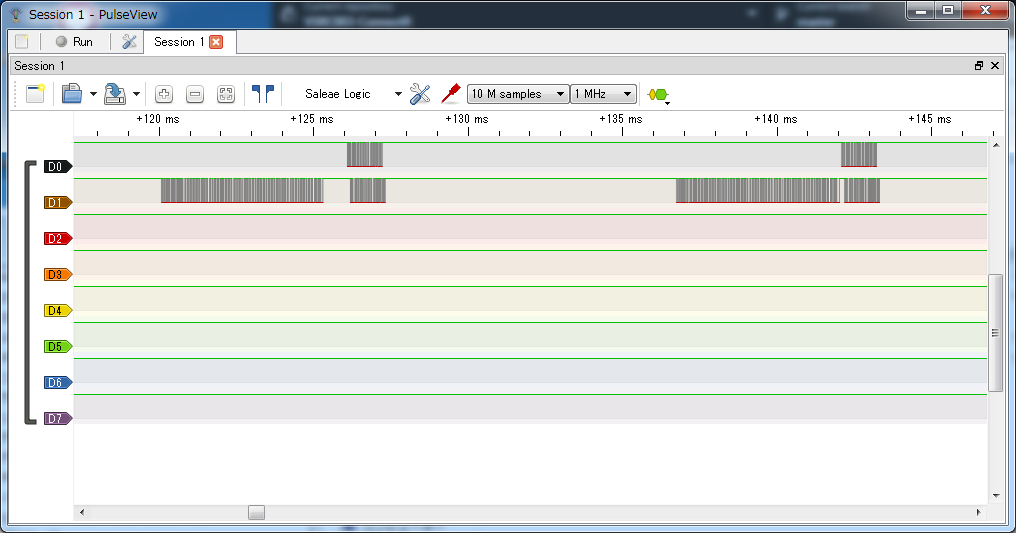
んん!?
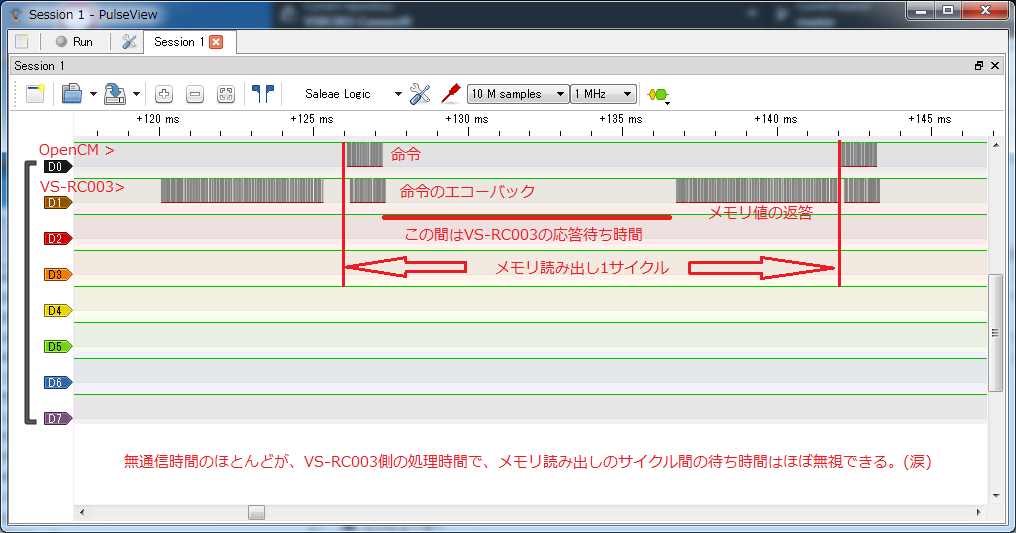
はい、どうやら隙間の原因は、VS-RC003の返答の待ち時間のようです。
サイクル間の待ち時間はほとんどないようなので、これは改善の余地なしですね。
あと、若干取りこぼすことがあるようなので、安定性の面では、まだ検討する部分があるのかもしれませんが、速度に関しては、これがほぼ限界のようです。
コメントを残す