平行リンク足AX-12版β-3&4
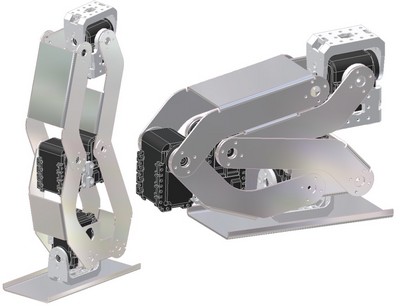
ロボットっぽく行くならとことんカウルだ!!
ってわけで、囲えると思ったところを囲ってみて4点支持の方向で考えてみた、途中経過の図。
ここまで作って、当初の目的のひとつ「軽量化」を思い出す。
ん〜。
ビジュアル重視?軽量化重視?
サーボ1個減らしたとはいえこんなにアルミを増やしたら意味なさそうだし・・・。
パフォーマンス重視して潔くβ-2に戻るべきかなぁ・・・。
それとも板厚1.5mmで設計してたけど4点支持だからいっそ1mmにしちゃってビジュアルを通すか・・・。
ただ、そもそも、こんなに加工精度のいる設計して大丈夫なのか!?
—
追記
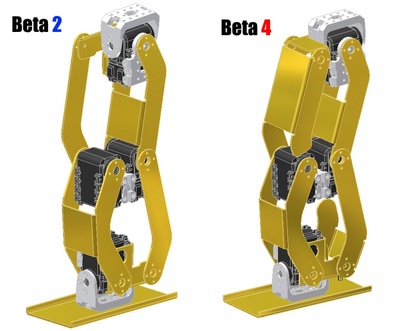
更に進めてみる。
アルマイト加工も視野に入れてゴールドにしてみた。
4支点の止め方が思いつかなかったので3支点にして、カウルだけやってみると、ちょっと微妙になった。
色をつけるとそれだけで存在感が出てくるのでβ2版でもいいかなという気がしてきた。
外注するならVistonかなぁと思って、Vistonのサイトを見ていたけど、DXFファイルで出力の方法が良く分からない。HELP!!
コメントを残す