Meridian Board(Teensy4.0)で、Dynamixelを回す
ニナガワさんから、ホビーロボットの規格を統一するようなモノを作らないかというとてもキラキラしたプロジェクトに誘っていただいて、サンプル基板を送っていただきました。
誘っていただいたからにはコミットしなきゃ!ということで、まず、TeensyでDinamixelを動くようにしたいと思います。
Dynamixelと言えば、以前から作ってた自前のライブラリもあったのですが、今はROBOTISが公式にイケてるライブラリがあって、恥ずかしくなって自前のライブラリは非公開にしています(笑)
なので、もちろん、ROBOTISさんの公式のライブラリを使います。
ちなみに、Arduino IDEでTeensyを書き込む準備は済んでいるものとして、話を勧めます。そのあたりのお話は、ニナガワさんの記事をどうぞ。
( Arduino IDE をTeensy,ESP32両対応にする )
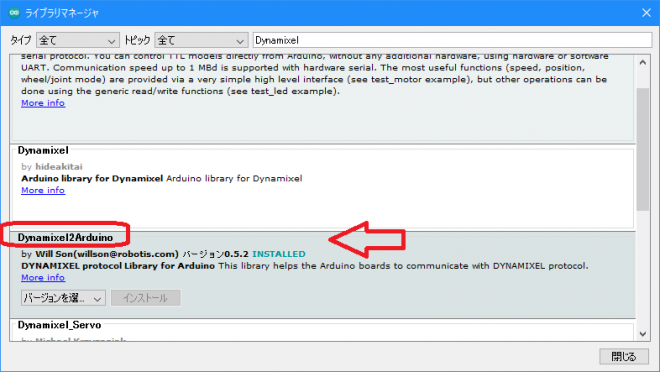
まずは、Arduino IDEのライブラリマネージャを立ち上げて、検索窓に「Dynamixel」と入力してください。本家のライブラリと個人製作のライブラリがいくつか出てくるので、「Dynamixel2Arduino」を選んで、インストールしてください。
この時点で作業はほぼ完了なのですが、動作確認まで行きましょう。
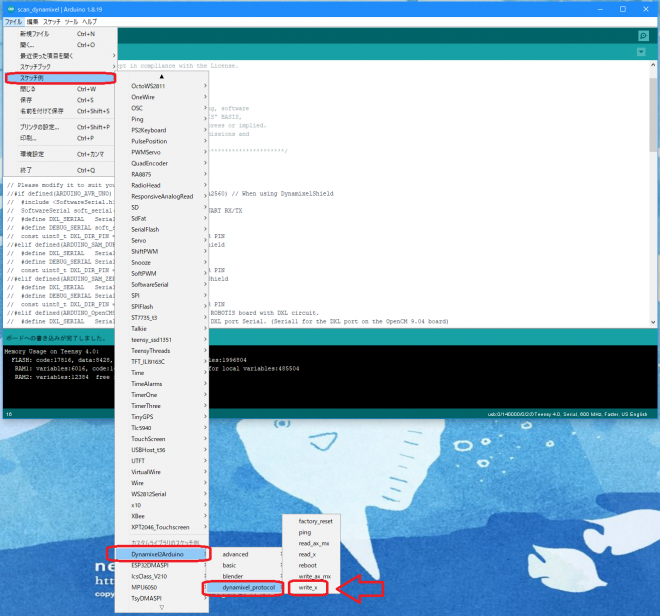
次に、インストールしたライブラリに含まれる、サンプルソースで実行確認していきましょう。
スケッチ例 → Dynamixel2Arduino→ dynamixel_protocol → wite_x を開きます。
このまま書き込んで、ハイ終わり!・・・とはいかなくて、若干、Meridian Boardに合わせて手直しする必要があります。
先頭のボードごとの “#if defined”の部分を全部コメントアウトして、最後の3行を足してください。
// Please modify it to suit your hardware.
//#if defined(ARDUINO_AVR_UNO) || defined(ARDUINO_AVR_MEGA2560) // When using DynamixelShield
// #include <SoftwareSerial.h>
// SoftwareSerial soft_serial(7, 8); // DYNAMIXELShield UART RX/TX
// #define DXL_SERIAL Serial
// #define DEBUG_SERIAL soft_serial
// const uint8_t DXL_DIR_PIN = 2; // DYNAMIXEL Shield DIR PIN
//#elif defined(ARDUINO_SAM_DUE) // When using DynamixelShield
// #define DXL_SERIAL Serial
// #define DEBUG_SERIAL SerialUSB
// const uint8_t DXL_DIR_PIN = 2; // DYNAMIXEL Shield DIR PIN
//#elif defined(ARDUINO_SAM_ZERO) // When using DynamixelShield
// #define DXL_SERIAL Serial1
// #define DEBUG_SERIAL SerialUSB
// const uint8_t DXL_DIR_PIN = 2; // DYNAMIXEL Shield DIR PIN
//#elif defined(ARDUINO_OpenCM904) // When using official ROBOTIS board with DXL circuit.
// #define DXL_SERIAL Serial3 //OpenCM9.04 EXP Board's DXL port Serial. (Serial1 for the DXL port on the OpenCM 9.04 board)
// #define DEBUG_SERIAL Serial
// const uint8_t DXL_DIR_PIN = 22; //OpenCM9.04 EXP Board's DIR PIN. (28 for the DXL port on the OpenCM 9.04 board)
//#elif defined(ARDUINO_OpenCR) // When using official ROBOTIS board with DXL circuit.
// // For OpenCR, there is a DXL Power Enable pin, so you must initialize and control it.
// // Reference link : https://github.com/ROBOTIS-GIT/OpenCR/blob/master/arduino/opencr_arduino/opencr/libraries/DynamixelSDK/src/dynamixel_sdk/port_handler_arduino.cpp#L78
// #define DXL_SERIAL Serial3
// #define DEBUG_SERIAL Serial
// const uint8_t DXL_DIR_PIN = 84; // OpenCR Board's DIR PIN.
//#else // Other boards when using DynamixelShield
// #define DXL_SERIAL Serial1
// #define DEBUG_SERIAL Serial
// const uint8_t DXL_DIR_PIN = 2; // DYNAMIXEL Shield DIR PIN
//#endif
#define DXL_SERIAL Serial2
#define DEBUG_SERIAL Serial
const uint8_t DXL_DIR_PIN = 6; // DYNAMIXEL Shield DIR PIN
以上です!
あとは、ソース内のIDとボーレートの設定をお手持ちのDynamixelに合わせて、書き込めば、左半身側のポートに繋がったDynamixelが動くかと思います。
これを、ベースにDynamixelをMeridian Baseに対応させるのは、次のネタにしたいと思います。
コメントを残す