平行リンク足AX-12版β-5

曲げで強化しつつ、肉抜きして現在こんな感じ。
1枚で支えているところが、本当にアルミで強度が足りるのかが不安。
とはいえ、ジュラルミンとか鉄とか加工できませんから、無理なときはアクリルあたりも使うしかないかな。
現在、側面の肉抜きを、どんなデザインで行うか考え中。
同時に、現時点で実際に330*400の上に配置してみた。
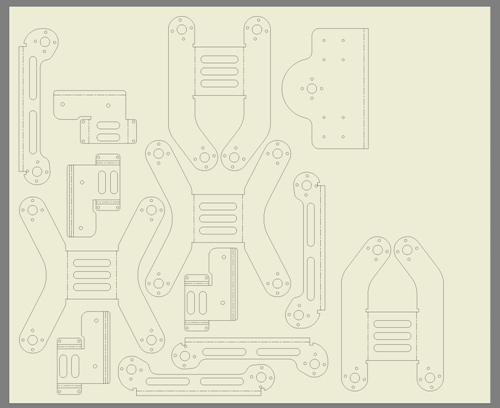
足のパーツだけだと、まだ、余裕がある感じ。
ここまできて、やっぱりヨー軸は追加しようという考えに至る。
ヨー軸も、リンクがギアを使ってサーボ1つで制御できるはずなので、その構造を考え中です。
「逆運動学で制御でき、モーターの数を可能な限り少なくし、稼動は最大限」が目標。
あと、両手両足にPSDセンサを配置したいと思う。
それも考慮にいれてさらに設計を進めていこう。
コメントを残す