KO-Link2のモーションと逆運動学 #01
KO-Link2の制御ボードCM-5でどうやって逆運動学を実装するか・・・。
かなり重要な問題なのですが、C言語でコードを0から書こうかとGDLを起動するも、あまり気が進まず。
結局、エクセルのシート上で計算したデータテーブルをエディターに手打ちで流し込むことにしました。
というわけで、エクセルでゴリゴリ計算するシートをせっせと作りました。
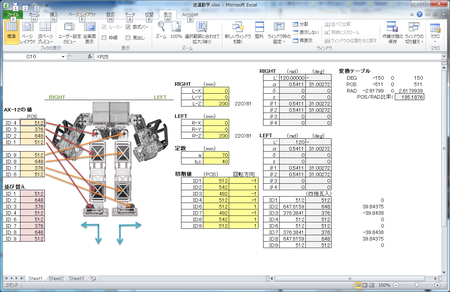
とりあえず完成ですが、初期値をもう一度見直しつつ、暇があればグラフを用いて図の描画も入れようかなと思います。
というわけで、歩行は今後作っていくとして、運動学の関係ない起き上がりやジャンプのモーションをサクっと作ってみました。
https://youtube.com/watch?v=i2xzOsCUONE
速度の遅いAX-12で1cmほどジャンプ出来ました。
もう4年も使っているモーターなのですが、ジャンプできたのはこれが初めてではないでしょうか(笑)
コメントを残す