KO-Link2の逆運動学 #02
昨日の続きで逆運動学の計算シートに図の表示機能をつけてみた。
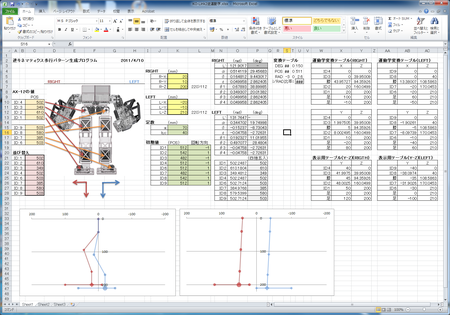
せっかくなので、公開します。
(けど、KO-Link2(399さんの平行リンク脚)でしか使えないので、あんまり公開しても意味ないかもw)
ダウンロード:KO-Link2逆運動学計算シート(Excel 2007形式)
黄色背景のボックスのXYZを入力すると、赤色背景のボックスにAX-12に送るべきポジションが表示されます。
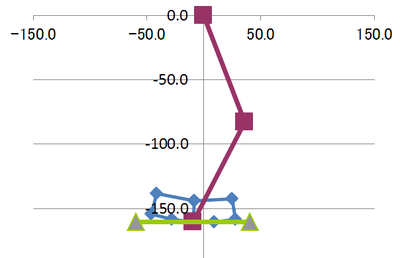
というわけで、ここまでできたらXYZに何の座標を放り込むかが問題になります。
いわゆる歩行の軌道です。
これもいろいろ考え方があって、自分が過去(KOKUTEN3)に採用していた方法では
- 正弦波の正の部分だけで足上げ(左右の足の位相を180°ずらす)
- 体重移動も正弦波
- 足の前後は左右で位相を180°ずらす
みたいな、要するに足先で半円を描く歩行をしていました。
他の人はどうしてるのかなーってことで、有名どころをあたってみると。
トコトコ丸的軌道
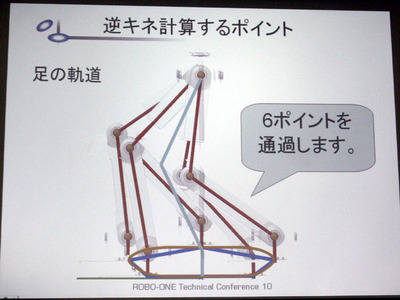
いろんな軌道を描いていますね。
どちらにも言えることなのですが、地面から離れたらすぐ前に出すのではなく、空中ですこし後ろに蹴ってから足を前に出すのがポイントみたいですね。
脚の軌道生成のプログラムと表示再生のプログラムが今後の課題です。
コメントを残す