カメラ動作テストと携帯用魚眼レンズ
久々にDreamPathFinderの製作です。
8月6日のRCIVに向けてカメラの動作テストを行いました。
とりあえずカメラの取りつけ。
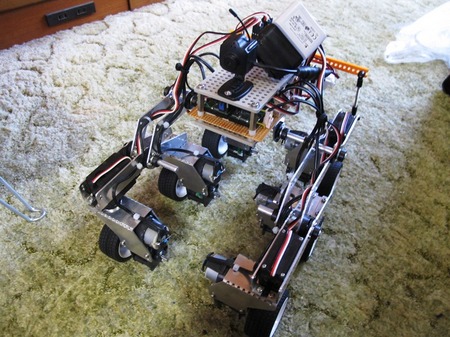
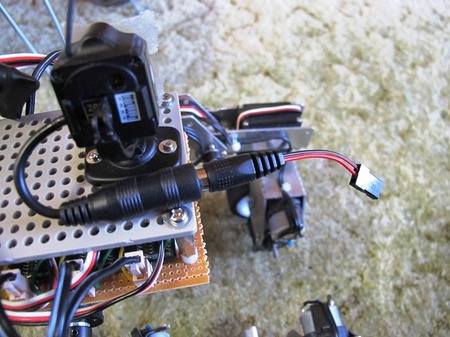
カメラの電源はサーボコネクタの仕様にして、CPUボードから電源供給できるようにしました。
操縦用のシステムは、地デジ非対応で使わなくなった液晶テレビと無線カメラ受信機、ロジクール受信コントローラー。
このシステムで10mくらいはカバーできます。

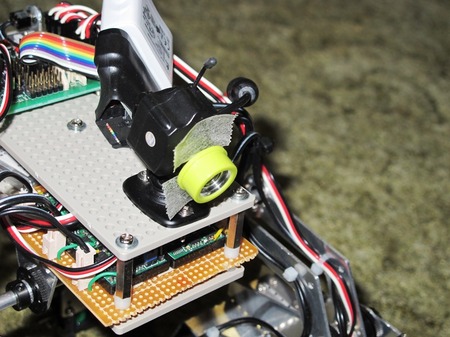
携帯用の魚眼レンズは借止め。
大熊さんから余ったレンズを頂きました。大熊さんの記事で歪みが結構あるらしいのですが、どれくらい使えるものか、これも実験したいと思います。
というわけで、以下の写真2枚がレンズの有無の比較画像。


かなり広角になります。
確かに端の方に歪みはありますが、操縦するにはこちらの方がかなり効果あります。
問題点としては、サーボやモーターのノイズがカメラに乗る点。電源は別の方が良さそうです。
あとカメラとコントローラーがどちらも2.4GHzなのですが、干渉の影響は今のところありません。
後のテストでかなり干渉していることが分かりました。
カメラの方の電波が強いのか、映像には影響ありませんが、コントローラーの方がダメージを受けているようで制御が効きません。
これでは、他のロボットのロジクールコントローラーにも影響が出ますね。
無線LANシステムに変更する必要がありそうです。
久しぶりにコメントさせて頂きます。
この前から、さらにカメラを搭載したんですか!
できたら、各々の金額も教えて頂けたら、幸いです。
自分は、ロバーの設計が終わりまして、アルミで車輪を加工しています。また、ロッカーボギー機構を少し変えて、六輪あるうちの真ん中の車輪二つのトルクを上げて登らせる構造となっています。
それと、実際に火星環境を想定して、軟弱地盤での走行も考えているので、車輪のスリップ率も実験で出そうと考えています。
以上ですが、何か進展、アドバイス等ありましたら、よろしくお願いします。
お久しぶりですね。
一通りの金額は以前の記事にあります。
http://dream-drive.net/archives/2011/02/_part25.html
変更点としては、タイヤの交換とカメラの取り付けだけです。
カメラはよくある1万円そこそこの無線ピンホールカメラですが、コントロール用の電波(どちらも2.4GHz)と干渉して残念なことになっています。
>>真ん中の車輪だけのトルクアップ
面白そうですね。
前輪・後輪とのトルク比でどれくらい走破能力が変わるのでしょうか。
こちらはまた進展があったら記事に書いていきます。