第22回ROBO-ONE出場
5年ぶりに人生6回目のROBO-ONEに参加しました。
今回は、Excel Walkerでのエントリーです。
予選は4.5m走、ニコニコで生放送されるということもあって、気合を入れて調整したところ、気合を入れて膝サーボを潰してしまいました(爆)

なぜか膝サーボのトルクが出ず歩行困難に…。
また、計算でのスラローム走行をプログラムしていたのですが、一度歩き始めると止まらないので、ニコニコ生放送内ではたくさんの”落ち着け”のコメントを頂きました(笑)
結果は散々(5cm)でしたが、久々にすごく楽しかったです。
ちなみにエントリーしたExcel Walker、基本的にはノーマルのG-ROBOTSなのですが、いくつか変更点が…。
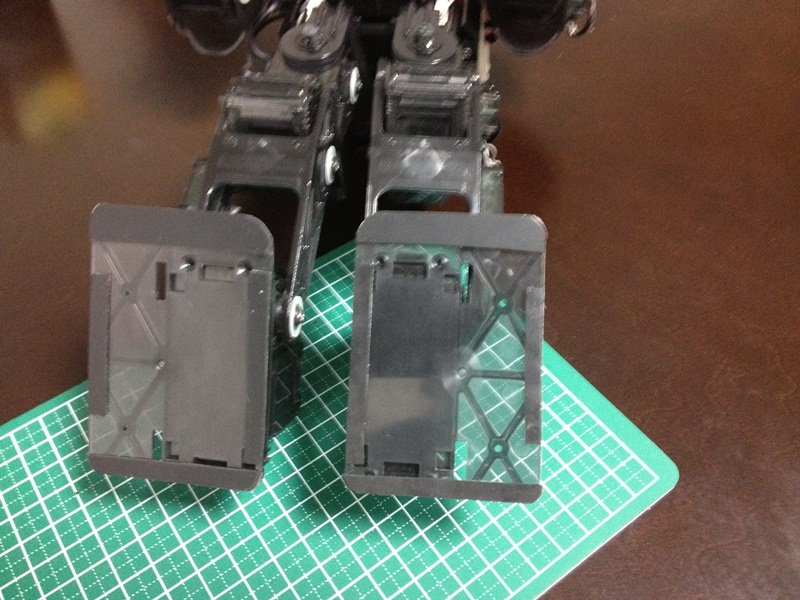
まずは、足裏、標準では大きすぎるので75mm×50mmに小型化し、ラバーを貼って完全グリップで挑みました。
また、追加でジャイロセンサー(KRG-4)を搭載、腰のところにピッチ方向とロール方向に検出するようにしています。
ちなみに大会直前に秋月ジャイロからKRG-4に変えましたが、KRG-4のドリフトレスの文句は伊達じゃないです。
KRG-3使ってる人は問答無用でKRG-4に変えた方がいいですね。

ただ、ジャイロの補正、よくよく考えると、角速度0(deg/sec)を目標に補正するとZMPが足裏から外れるか外れないかというギリギリのところで安定してしまうんですよね。
今までP制御だったところをPID制御に変えて望んでみたものの根本的に解決になっていないですよね。
やはり、理論的には角度制御にしないとなーというところで、安価な積分ジャイロが発売されるといいなーとか思うわけです。
ちなみに今回予選ぶっちぎり1位のフロスティさんに聞いたら、ヨー軸方向だけジャイロ制御しているとか。
4.5mでの走行方向の誤差は2度以内に抑えてるということらしいのですが、流石、見てるポイントが違いますね。
そして今回、一番気になったロボットはこちら

引間さん製作のイクマです。
ロボットに服を着せた”くまたろう”と違って、完全にぬいぐるみのイクマ。
新しいKUMACOの製作に対するモチベーションがメラメラと湧いてきました!
あと、興味深かった技術的なネタとしては、なぐさんのオリジナルのマイコンボード

写真掲載の許可もいただきました。
サイズあたりのスペックが抜群で、とてもバランスが良いです。
以前からもっと高スペックなRPU-10が欲しいと思っていたので、すごく良いなと思いました。
懇親会でいろいろお話を聞かせていただきましたが、VAIOユーザーだったりExcelマニアだったり、いろいろ共通点があって盛り上がりました。
そんなこんなで、今回もたくさんの刺激を頂いた22回ROBO-ONE。
久々にエントリーして、すごく楽しめました。
バトルの方も、投げ技続出、ドロップキックも飛び出てとても見応えのある試合ばかり。
5年前は、スリップダウン2回で1ダウンとか、なかなか面白くない試合も多かったので、すごくレベルが上がった印象でした。
次回は運営陣も変更があるようで、どんなイベントになるのでしょうねー。
コメントを残す