上肢帯のあるロボット

これは2007~2008年に、自分が大学4年の学部の卒論用に作った機体です。
研究自体は恥ずかしくて載せられませんが、使用したロボット自体は少し拘っていて、よりヒトの動きに近いことをやりたかったため、「上肢帯」を模した機構を付けたヒトの上半身を作りました。
ちょうど、KUMACOを作っていた頃に同時に作っていました。
上肢帯とは、鎖骨と肩甲骨を含む、腕の土台となる部分ですね。
通常、ロボットでは、簡単なモデルが優先されるため、だいたい省略されるのですが、人の動きに近づけることを考えると必要かな~と思って拘って作ってみました。
具体的には下記の様な動きを司ります。
回旋

内転・外転
なんとなく、ヒトの動きをするならば必要そうですよね。
ちなみに実際にロボットを動かすと、こんな感じです。
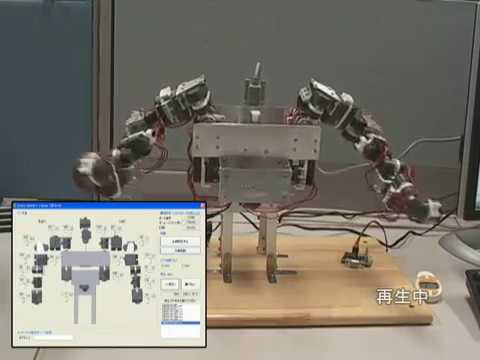
アクチュエータは、研究室になぜか大量に転がっていた、当時でも時代遅れなMega-roboticsというメーカーのAI Motorを使っています。
ベストテクノロジーで売ってたみたいですね。
解像度が254段階(1バイト分)で、保持トルクも弱く、すぐにハンチングしてしまいます。
で、どうしてこんな話を今更…という話なのですが、
このロボットは、当然そのまま大学に置いてきた(部品が大学の資産なので)のですが、
当時、所属していた研究室は、教授の退官と共に解体されてしまって、研究もロボットもどこへやら…。
まぁ、今更出てきたところで、まともに使える代物ではないものの、
もう少し弄りたかったな~と思いだしたため…
というか、上肢帯いいよ、上肢帯!みたいなこともみんなに伝えたくて。。。(謎
あらためて同じ軸数で、改良したものを設計してみました。
(たまたま、RS306が大量にあったというのも理由ですね。)
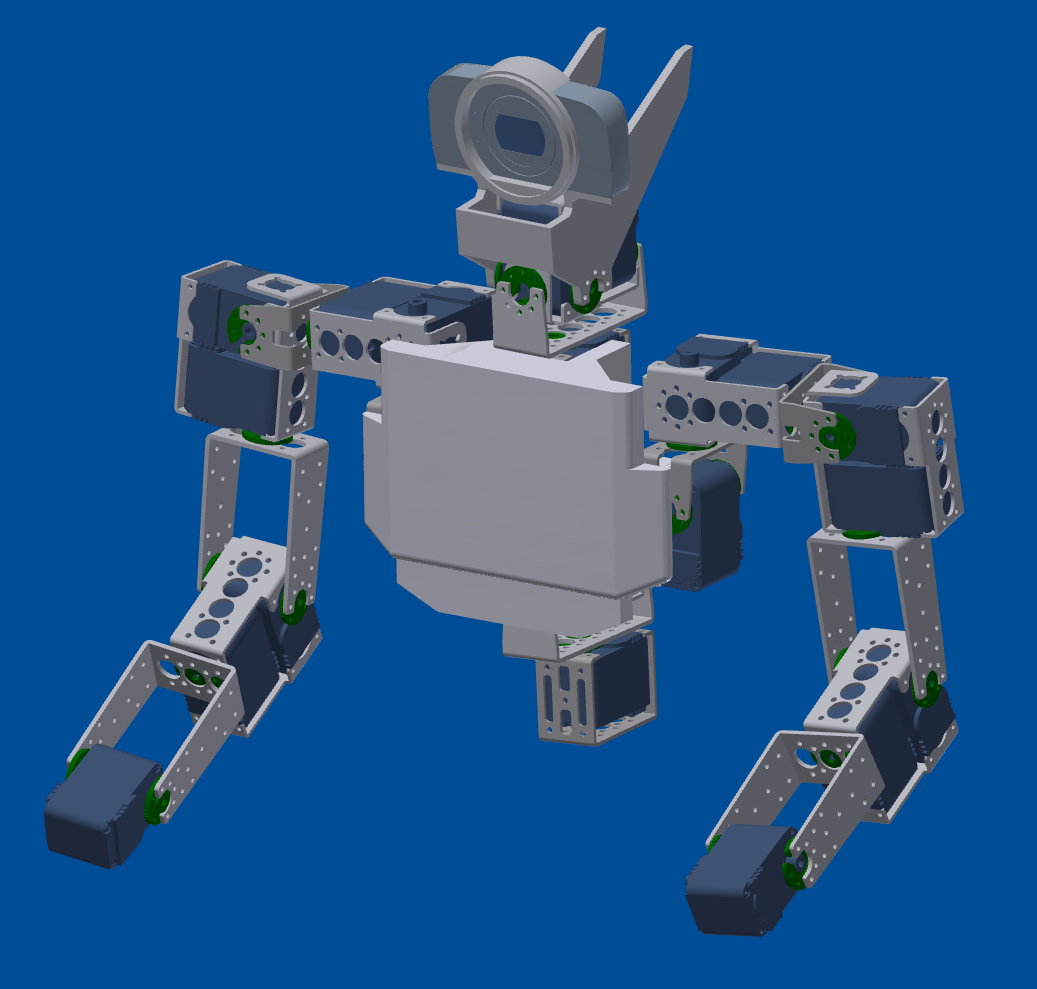
頭部には、カメラ+マイクも搭載しています。
3Dプリンタの技術も投入ですね!
メインCPUは当然、core i7!(の予定)
つまり、マイコンを載せたスタンドアロンではなく、リモートブレイン用の機体として、ROSもしくはWindowsの世界で、ロボットと遊んで見ようかな~と思います。
で、先日の3Dプリンタの話に繋がって、今、設計と製作を同時進行中です。
コメントを残す