ROSCon JP 2018に参加
ROSCon JP 2018に参加してきました!
ROSConとは、ROS開発者の国際会議で、ROSCon JPはその日本版です。
TEDに対するTEDxみたいなものって、認識でいいんでしょうか。
本家では参加記念にビールグラスがもらえるそうなのですが、日本らしさゆえに、日本酒のおちょこをいただきました。
アールティさんのロゴ入りです!


もちろん、郷に入らば郷に従えの精神で、配られたTシャツはその場で着用!
(というか、会場で着ないと、なかなか着る機会ないですよね)

各社・各グループ、様々なアプローチで、ROSを駆使していました。
自分のROSに対する理解度は、会場でもかなり底辺クラスだったと思います。
いまいち概念しか分かってなかったのですが、ノード間はTCP/IPで通信しているため、ノードを細かくしすぎると制御が遅くなることなど、いろいろ問題点が聞けたのが非常に参考になりました。
基本的に同一PCで実行されることも保障されていないため、OSでのメモリ間共有などの通信は実装されていないそうです。
となると、ある程度大きな塊でノードにしたほうがよさそうですね。
サーボ単位でノード化するのかと思っていたので目からウロコでした。
場合によっては、ロボット単位でノードにして、ロボット同士の協調動作にROSを使用するなど…、もっと大きい視野で捉えたほうがいいのかなと思ったら、一気に理解が深まった気がします。
ふと、レスキューロボットコンテストのプラットフォームに使えるんじゃないかなーとか、思いながら聞いていました。最近、大会のルールもマンネリなので、SLAMの要素なんか取り入れたら、一気に過熱するんじゃないかなーなんて思いました。(笑)
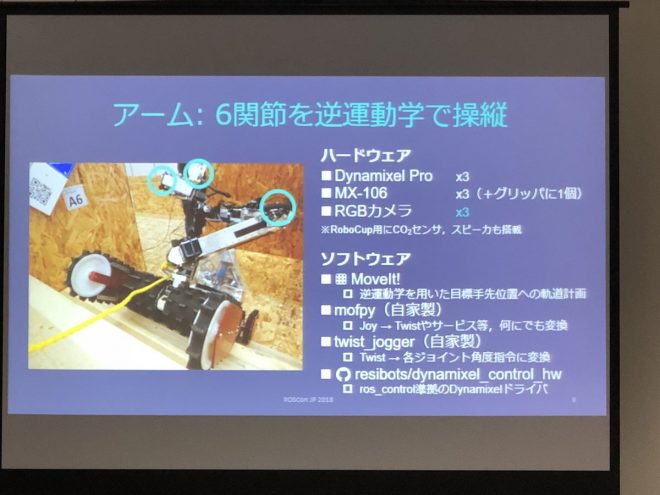
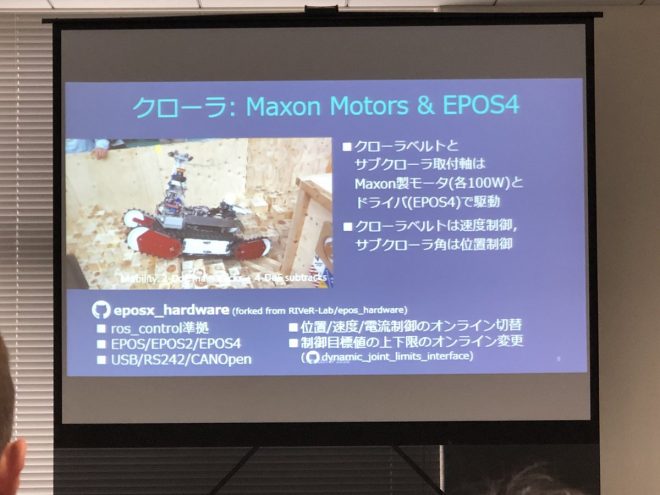
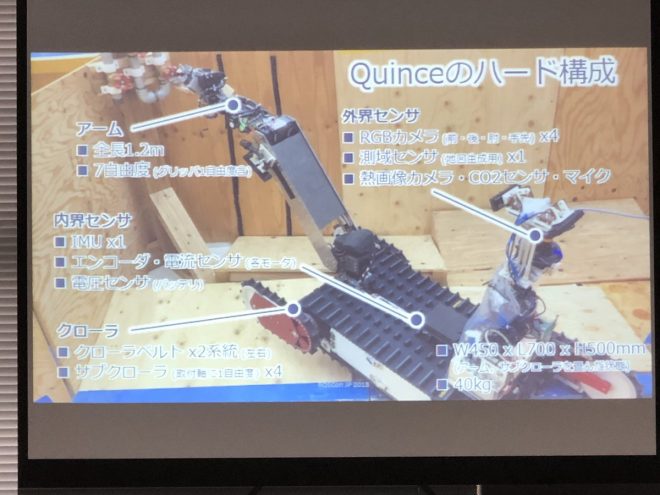
そんなこんなで、東北大が実際にロボコンでROSを取り入れる活動をしているということで、気が付けばスライドをパシャパシャ撮っていましたのでご紹介。
ROSは、いずれきちんとやろうと思います。
上半身ロボなど、まさにサーボ単位じゃなくて、ロボットまるごとノードにして、何かさせると面白そうです。
ROS2で、Windows対応というのも追い風ですね。
というわけで、すごく刺激を受けた1日でした。
コメントを残す