VS-RC003でROBOTIS Dynamixelを制御する#03
なんとなく出来そうだったのではじめてみた、VS-RC003でDynamixelを動かす基板作りですが、一つの目標としてVS-RC003でKO-Link2Sを動かせるところまで走り切ってみようと思います。
KO-Linkに載せるにあたっては、前回同様にユニバーサル基板で清書しようかとも思ったのですが、ちょうどseeedで、プリント基板が3枚1ドルのキャンペーンをやってるのが目についたんで、KiCADで基板起こしてみました。
とはいっても、ほぼOpenCM9.0.4の機能を使っているので、使い勝手のよい端子を引き出すだけの基板です。
ピンヘッダとコネクタばかりで、フルカラーLED用の抵抗がかろうじて3本あるだけ…(笑)
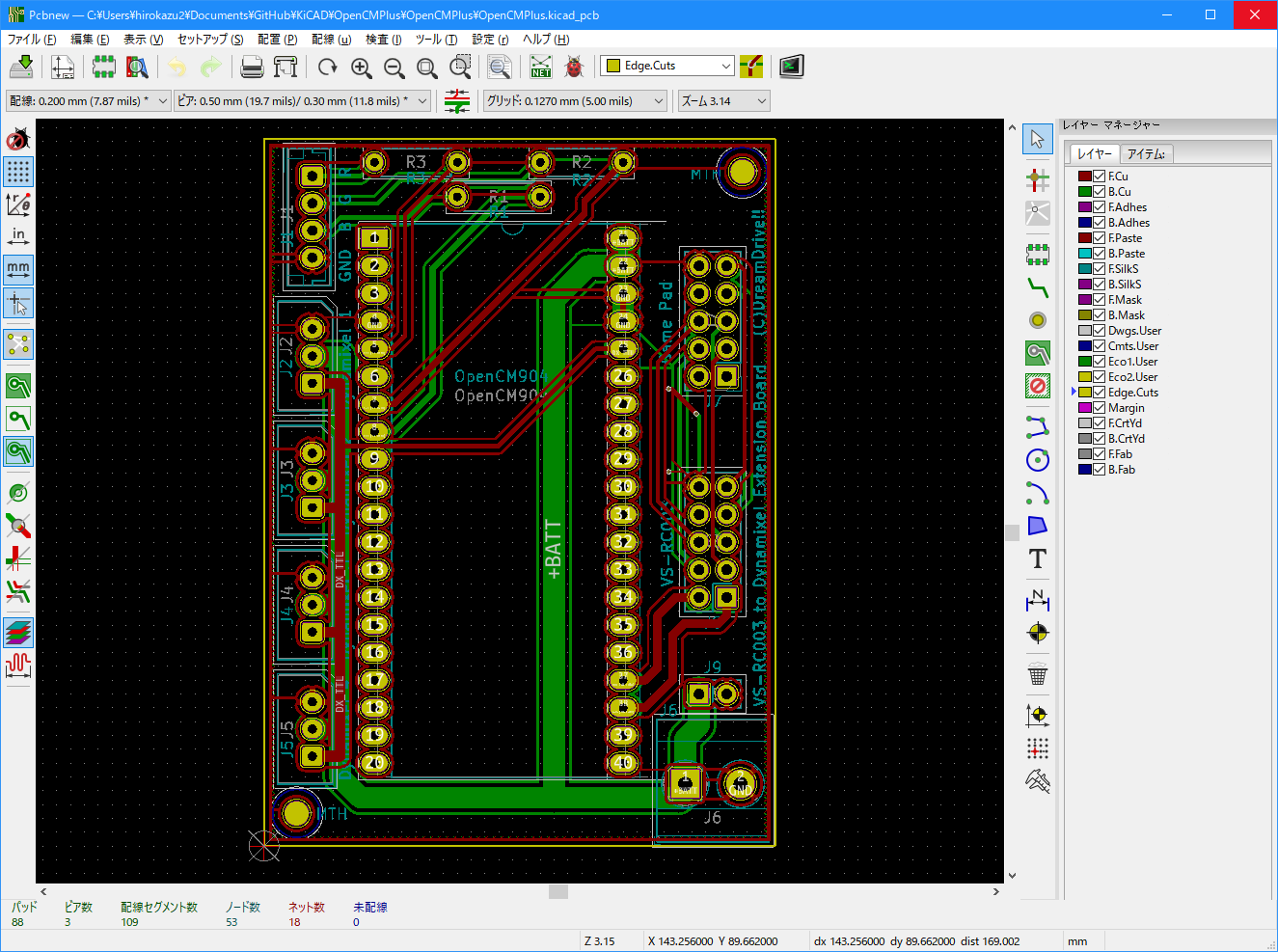
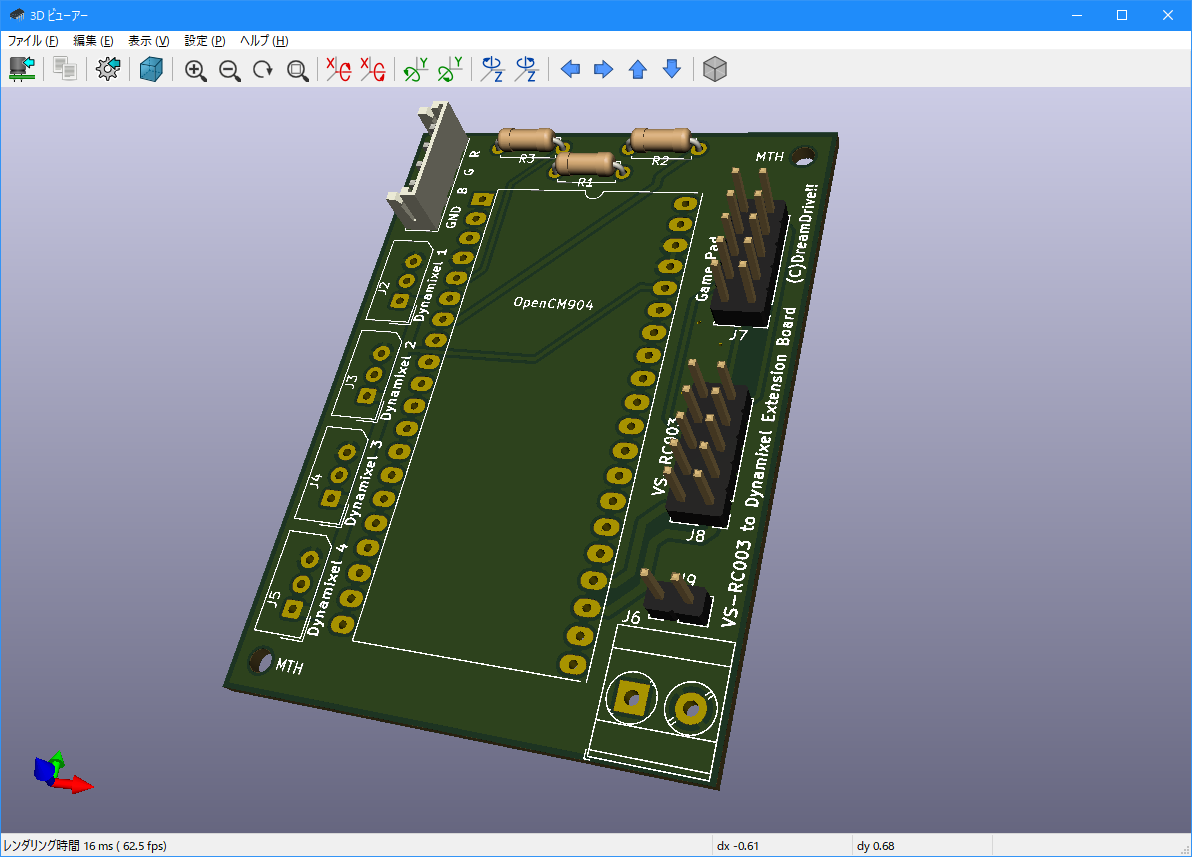
ピンヘッダの位置が、VS-RC003の10ピンと並ぶように配置しました。
横に並べて、最短距離のフラットケーブルで接続できます。
あと、Dynamixelのハブも兼ねています。
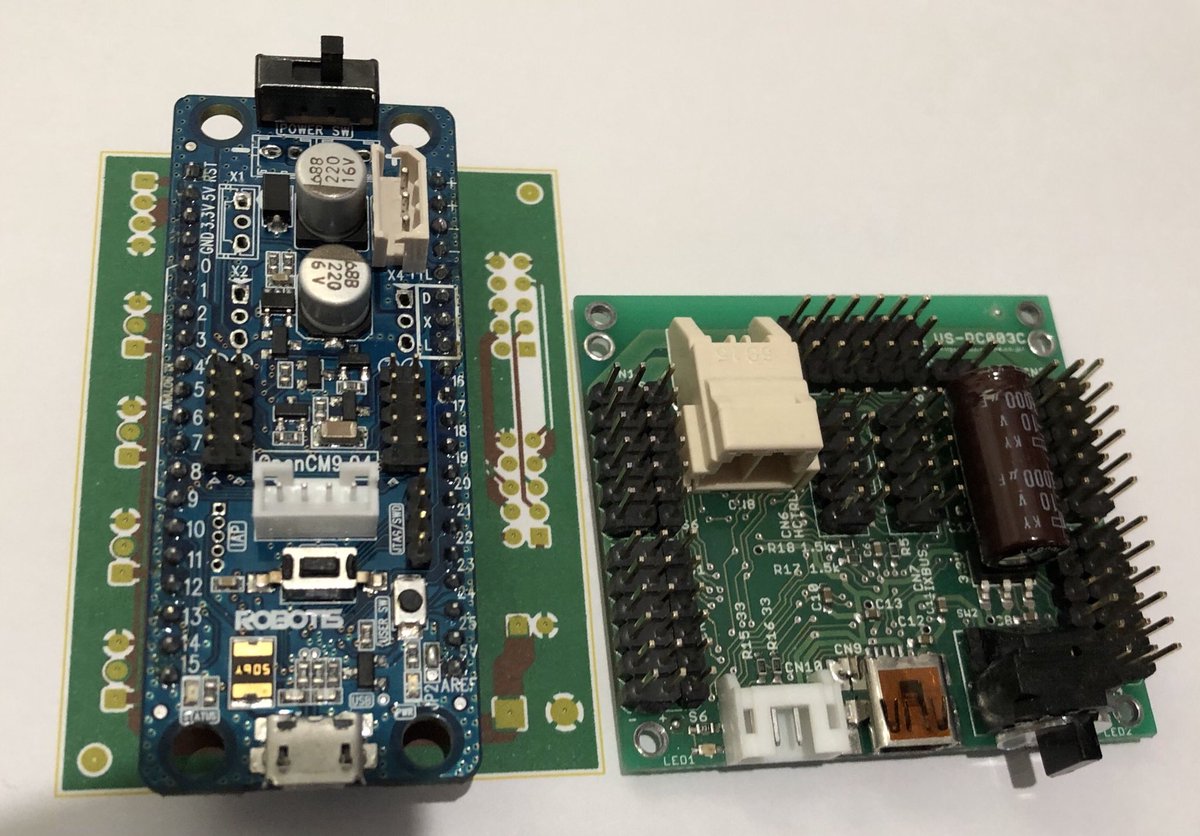
プリンタで紙に印刷して、大きさとピンの位置の確認。
2枚の基板を合わせると、まぁまぁの面積になりますが、KO-Linkの頭の中は大きいので問題はないでしょう。
今晩、発注したので、早ければ今週中に基板完成まで持っていけるかなと思います。
コメントを残す