ODriveでBLDCモーターの制御 #04 ASCII Protocol
ODriveの動作には、CANやRC PWMなどの他、UARTを使ったバイナリで通信するNative Protocolと、アスキーコードで通信通信するASCII Protocolの二種類のシリアル通信用プロトコルがあります。
仕様書をざっと見ても、更に名前からも分かる通り、ASCII Protocolの方が1回の命令のパケット長が長く、高速に通信するならNative Protocolの方が良いのでしょう。
これからロボットを自作しようという話なので、SDKかサンプルプログラムを期待するわけですが、ODriveはサンプルもツールも全部pythonで作られています。python好きなら良かったのですが、どうもpythonに抵抗があるので、どうしてもC++で書き直したいところです。
ちょうど、前回触ったArduino( C++ )がasciiプロトコルのライブラリになっているため、こちらをそのままVisualC++/MFCのプロジェクトに放り込んでみます。
接続は、ODriveオンボードのUSBではなく、GPIOのUARTにUSB-TTL変換ケーブルを使って接続しました。
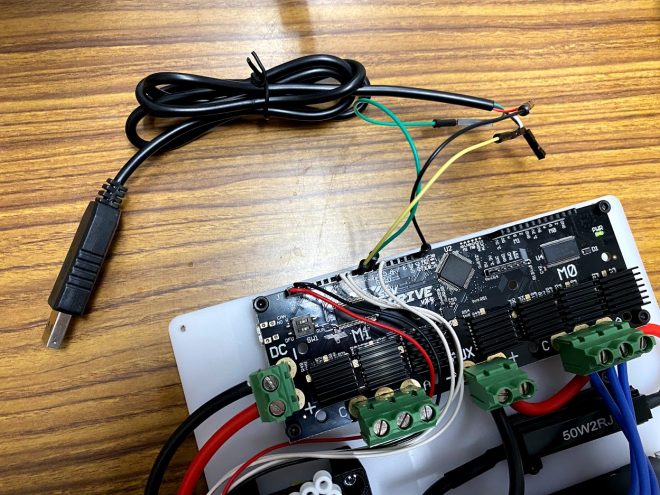
ODriveオンボードのUSBの場合、ODriveの電源を落とすとシリアルポートもPC上から消えてしまうのですが、変換機を使えばポートは残るので便利かなーという理由です。あと、元になったソースがArduinoライブラリなので接続を揃えたかったというのもありますね。
GPIO1,2にTxDとRxDを接続し、GND同士を結線すれば、3本繋いで接続は完了です。
接続が出来れば、実際に通信です。アスキープロトコル、非常に簡単でした。
例えば位置制御で、「axis0のモーターを2回転回転させる。速度とトルクは指定なし」の場合は下記のコマンドを送ります。小数点は省略できます。
p 0 -2 0 0[LF]
パラメータ1つめがモーターID、2,3,4はそれぞれ、位置・速度・トルクになります。floatで少数で送ってもいいし、整数で送ってもいいです。
実際、数値を変えながら連続して送ると、モーターが回ります。
また、パラメータの書き込みの場合は、例えば「axis0の速度リミットを1000回転/秒に設定する」だと・・・
w axis0.controller.config.vel_limit 1000.0[LF]
です。
ただ、設定の場合、返り値がないのが、不安なところです。
なので、書き込んだパラメータを読み取ってみます。
例えば「axis0の速度リミットの設定値を読み取る」だと・・・
r axis0.controller.config.vel_limit[LF]
になります。送るとODriveから、値のみが文字で帰ってきます。
受け取った文字列を、atoiやatofで変換すればOKです。
帰ってきた値が設定した値になっていれば、設定がうまくいったことが分かりますね。
Native Protocolの方にはCRCなどもあるようですが、ASCII Protocolには、チェックサムやエラー処理はないので、そのあたりは割り切って使うしかないようです。ここはASCII Protocolの不安ポイントですね。
さて、これらを使って、簡単にアプリを作ってみました。
ODriveのお作法ですが、電源投入から「フルキャリブレーション」→「クローズドループ」→「ひたすら位置を送信」、という手順で動作させます。
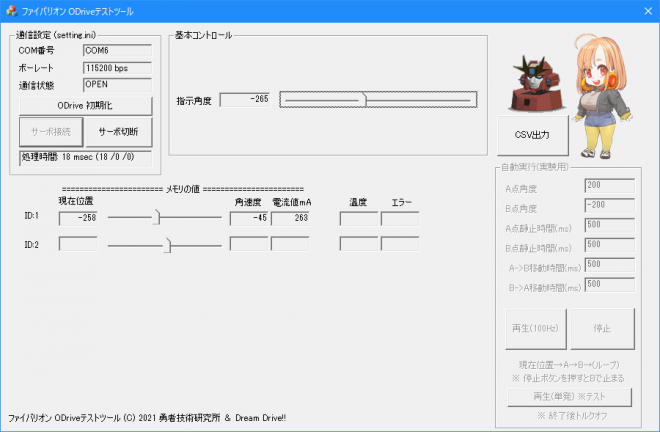
ついでに、パラメータの読み書きが出来るので、動作中のパラメータを吐き出して、グラフ化することも可能です。
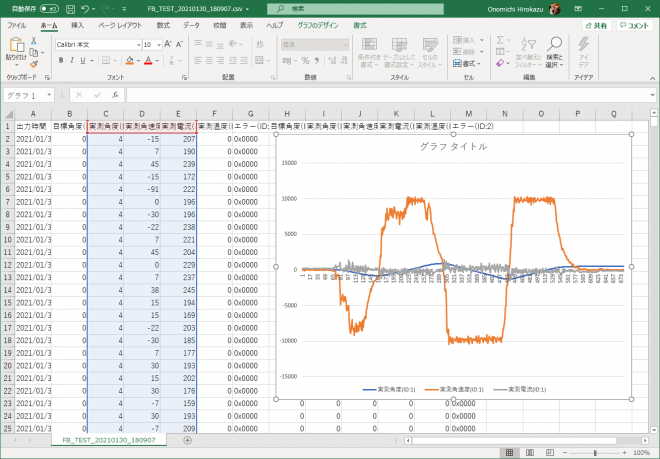
ASCII Protocolに関しては、すごく素直な感じで、サクッと実装出来ました。
あとはパラメータの読み書きが出来るので、初期設定もGUIで作っちゃったら便利かなーと思ったのですが・・・
パラメータがどうなってるのが、Odrivetoolで、全容を吐き出して、その多さに愕然としております。とりあえず、せっかく吐き出したので、忘備録として張り付けておきます。(実際の設定値は参考にならないので注意!)
とりあえず、よく使うパラメータだけ設定出来るツールにしよう(^^;A
ODriveのパラメータ・変数・関数一覧
- odrv0:
- vbus_voltage = 12.598169326782227 (float)
- ibus = 0.0 (float)
- ibus_report_filter_k = 1.0 (float)
- serial_number = ●●●●●●●●●●●● (int)
- hw_version_major = 3 (int)
- hw_version_minor = 6 (int)
- hw_version_variant = 56 (int)
- fw_version_major = 0 (int)
- fw_version_minor = 5 (int)
- fw_version_revision = 1 (int)
- fw_version_unreleased = 1 (int)
- brake_resistor_armed = True (bool)
- brake_resistor_saturated = False (bool)
- system_stats:
- uptime = 7747 (int)
- min_heap_space = 41560 (int)
- min_stack_space_axis0 = 1684 (int)
- min_stack_space_axis1 = 1684 (int)
- min_stack_space_comms = 3864 (int)
- min_stack_space_usb = 3732 (int)
- min_stack_space_uart = 3924 (int)
- min_stack_space_can = 836 (int)
- min_stack_space_usb_irq = 1796 (int)
- min_stack_space_startup = 1708 (int)
- stack_usage_axis0 = 364 (int)
- stack_usage_axis1 = 364 (int)
- stack_usage_comms = 232 (int)
- stack_usage_usb = 364 (int)
- stack_usage_uart = 172 (int)
- stack_usage_usb_irq = 252 (int)
- stack_usage_startup = 340 (int)
- stack_usage_can = 188 (int)
- usb:
- rx_cnt = 85 (int)
- tx_cnt = 85 (int)
- tx_overrun_cnt = 0 (int)
- i2c:
- addr = 0 (int)
- addr_match_cnt = 0 (int)
- rx_cnt = 0 (int)
- error_cnt = 0 (int)
- config:
- enable_uart = True (bool)
- uart_baudrate = 115200 (int)
- enable_i2c_instead_of_can = False (bool)
- enable_ascii_protocol_on_usb = True (bool)
- max_regen_current = 0.0 (float)
- brake_resistance = 0.05000000074505806 (float)
- dc_bus_undervoltage_trip_level = 8.0 (float)
- dc_bus_overvoltage_trip_level = 59.92000198364258 (float)
- enable_dc_bus_overvoltage_ramp = False (bool)
- dc_bus_overvoltage_ramp_start = 59.92000198364258 (float)
- dc_bus_overvoltage_ramp_end = 59.92000198364258 (float)
- dc_max_positive_current = inf (float)
- dc_max_negative_current = -9.999999974752427e-07 (float)
- gpio1_pwm_mapping:
- endpoint = (0, 0) (RemoteProperty)
- min = 0.0 (float)
- max = 0.0 (float)
- gpio2_pwm_mapping:
- endpoint = (0, 0) (RemoteProperty)
- min = 0.0 (float)
- max = 0.0 (float)
- gpio3_pwm_mapping:
- endpoint = (0, 0) (RemoteProperty)
- min = 0.0 (float)
- max = 0.0 (float)
- gpio4_pwm_mapping:
- endpoint = (0, 0) (RemoteProperty)
- min = 0.0 (float)
- max = 0.0 (float)
- gpio3_analog_mapping:
- endpoint = (0, 0) (RemoteProperty)
- min = 0.0 (float)
- max = 0.0 (float)
- gpio4_analog_mapping:
- endpoint = (0, 0) (RemoteProperty)
- min = 0.0 (float)
- max = 0.0 (float)
- user_config_loaded = True (bool)
- axis0:
- error = 0x0000 (int)
- step_dir_active = False (bool)
- current_state = 1 (int)
- requested_state = 0 (int)
- loop_counter = 5114087 (int)
- lockin_state = 0 (int)
- is_homed = False (bool)
- config:
- startup_motor_calibration = False (bool)
- startup_encoder_index_search = False (bool)
- startup_encoder_offset_calibration = False (bool)
- startup_closed_loop_control = False (bool)
- startup_sensorless_control = False (bool)
- startup_homing = False (bool)
- enable_step_dir = False (bool)
- step_dir_always_on = False (bool)
- turns_per_step = 0.0009765625 (float)
- watchdog_timeout = 0.0 (float)
- enable_watchdog = False (bool)
- step_gpio_pin = 1 (int)
- dir_gpio_pin = 2 (int)
- calibration_lockin:
- current = 10.0 (float)
- ramp_time = 0.4000000059604645 (float)
- ramp_distance = 3.1415927410125732 (float)
- accel = 20.0 (float)
- vel = 40.0 (float)
- sensorless_ramp:
- current = 10.0 (float)
- ramp_time = 0.4000000059604645 (float)
- ramp_distance = 3.1415927410125732 (float)
- accel = 200.0 (float)
- vel = 400.0 (float)
- finish_distance = 100.0 (float)
- finish_on_vel = True (bool)
- finish_on_distance = False (bool)
- finish_on_enc_idx = False (bool)
- general_lockin:
- current = 10.0 (float)
- ramp_time = 0.4000000059604645 (float)
- ramp_distance = 3.1415927410125732 (float)
- accel = 20.0 (float)
- vel = 40.0 (float)
- finish_distance = 100.0 (float)
- finish_on_vel = False (bool)
- finish_on_distance = False (bool)
- finish_on_enc_idx = False (bool)
- can_node_id = 0 (int)
- can_node_id_extended = False (bool)
- can_heartbeat_rate_ms = 100 (int)
- fet_thermistor:
- error = 0x0000 (int)
- temperature = 14.813278198242188 (float)
- config:
- temp_limit_lower = 100.0 (float)
- temp_limit_upper = 120.0 (float)
- enabled = True (bool)
- motor_thermistor:
- error = 0x0000 (int)
- temperature = 0.0 (float)
- config:
- gpio_pin = 4 (int)
- poly_coefficient_0 = 0.0 (float)
- poly_coefficient_1 = 0.0 (float)
- poly_coefficient_2 = 0.0 (float)
- poly_coefficient_3 = 0.0 (float)
- temp_limit_lower = 100.0 (float)
- temp_limit_upper = 120.0 (float)
- enabled = False (bool)
- motor:
- error = 0x0000 (int)
- armed_state = 0 (int)
- is_calibrated = True (bool)
- current_meas_phB = 0.6694726347923279 (float)
- current_meas_phC = 0.24526754021644592 (float)
- DC_calib_phB = -0.3872242271900177 (float)
- DC_calib_phC = 0.35895684361457825 (float)
- phase_current_rev_gain = 0.02500000037252903 (float)
- effective_current_lim = 10.0 (float)
- current_control:
- p_gain = inf (float)
- i_gain = nan (float)
- v_current_control_integral_d = 0.0 (float)
- v_current_control_integral_q = 0.0 (float)
- Ibus = 0.0 (float)
- final_v_alpha = 0.0 (float)
- final_v_beta = 0.0 (float)
- Id_setpoint = 0.0 (float)
- Iq_setpoint = 0.0 (float)
- Iq_measured = 0.0 (float)
- Id_measured = 0.0 (float)
- I_measured_report_filter_k = 1.0 (float)
- max_allowed_current = 60.75 (float)
- overcurrent_trip_level = 67.5 (float)
- acim_rotor_flux = 0.0 (float)
- async_phase_vel = 0.0 (float)
- async_phase_offset = 0.0 (float)
- gate_driver:
- drv_fault = 0 (int)
- timing_log:
- general = 17938 (int)
- adc_cb_i = 3482 (int)
- adc_cb_dc = 12870 (int)
- meas_r = 41396 (int)
- meas_l = 37817 (int)
- enc_calib = 44604 (int)
- idx_search = 34199 (int)
- foc_voltage = 63753 (int)
- foc_current = 19673 (int)
- spi_start = 2246 (int)
- sample_now = 1782 (int)
- spi_end = 5378 (int)
- config:
- pre_calibrated = True (bool)
- pole_pairs = 7 (int)
- calibration_current = 5.0 (float)
- resistance_calib_max_voltage = 2.0 (float)
- phase_inductance = inf (float)
- phase_resistance = 0.21308204531669617 (float)
- torque_constant = 0.006889999844133854 (float)
- direction = -1 (int)
- motor_type = 0 (int)
- current_lim = 11.0 (float)
- current_lim_margin = 8.0 (float)
- torque_lim = inf (float)
- inverter_temp_limit_lower = 100.0 (float)
- inverter_temp_limit_upper = 120.0 (float)
- requested_current_range = 60.0 (float)
- current_control_bandwidth = 1000.0 (float)
- acim_slip_velocity = 14.706000328063965 (float)
- acim_gain_min_flux = 10.0 (float)
- acim_autoflux_min_Id = 10.0 (float)
- acim_autoflux_enable = False (bool)
- acim_autoflux_attack_gain = 10.0 (float)
- acim_autoflux_decay_gain = 1.0 (float)
- controller:
- error = 0x0000 (int)
- input_pos = 0.0 (float)
- input_vel = 0.0 (float)
- input_torque = 0.0 (float)
- pos_setpoint = 0.0 (float)
- vel_setpoint = 0.0 (float)
- torque_setpoint = 0.0 (float)
- trajectory_done = True (bool)
- vel_integrator_torque = 0.0 (float)
- anticogging_valid = False (bool)
- config:
- gain_scheduling_width = 10.0 (float)
- enable_vel_limit = True (bool)
- enable_current_mode_vel_limit = True (bool)
- enable_gain_scheduling = False (bool)
- enable_overspeed_error = True (bool)
- control_mode = 3 (int)
- input_mode = 1 (int)
- pos_gain = 4.0 (float)
- vel_gain = 0.007499999832361937 (float)
- vel_integrator_gain = 0.0 (float)
- vel_limit = 300.0 (float)
- vel_limit_tolerance = 1.2000000476837158 (float)
- vel_ramp_rate = 1.0 (float)
- torque_ramp_rate = 0.009999999776482582 (float)
- circular_setpoints = False (bool)
- circular_setpoint_range = 1.0 (float)
- homing_speed = 0.25 (float)
- inertia = 0.0 (float)
- axis_to_mirror = 255 (int)
- mirror_ratio = 1.0 (float)
- load_encoder_axis = 0 (int)
- input_filter_bandwidth = 2.0 (float)
- anticogging: …
- index = 0 (int)
- pre_calibrated = False (bool)
- calib_anticogging = False (bool)
- calib_pos_threshold = 1.0 (float)
- calib_vel_threshold = 1.0 (float)
- cogging_ratio = 1.0 (float)
- anticogging_enabled = True (bool)
- move_incremental(displacement: float, from_input_pos: bool)
- start_anticogging_calibration()
- encoder:
- error = 0x0000 (int)
- is_ready = False (bool)
- index_found = False (bool)
- shadow_count = 2097 (int)
- count_in_cpr = 2098 (int)
- interpolation = 1.0 (float)
- phase = -2.733459711074829 (float)
- pos_estimate = 0.1279916763305664 (float)
- pos_estimate_counts = 2097.84375 (float)
- pos_cpr = 0.1280050277709961 (float)
- pos_cpr_counts = 2097.796875 (float)
- pos_circular = 0.12796497344970703 (float)
- hall_state = 7 (int)
- vel_estimate = 0.0 (float)
- vel_estimate_counts = 250.00001525878906 (float)
- calib_scan_response = 0.0 (float)
- pos_abs = 2098 (int)
- spi_error_rate = 0.0 (float)
- config:
- mode = 257 (int)
- use_index = False (bool)
- find_idx_on_lockin_only = False (bool)
- abs_spi_cs_gpio_pin = 4 (int)
- zero_count_on_find_idx = True (bool)
- cpr = 16384 (int)
- offset = -8589 (int)
- pre_calibrated = False (bool)
- offset_float = 0.3931249976158142 (float)
- enable_phase_interpolation = True (bool)
- bandwidth = 1000.0 (float)
- calib_range = 0.019999999552965164 (float)
- calib_scan_distance = 50.26548385620117 (float)
- calib_scan_omega = 12.566370964050293 (float)
- idx_search_unidirectional = False (bool)
- ignore_illegal_hall_state = False (bool)
- sincos_gpio_pin_sin = 3 (int)
- sincos_gpio_pin_cos = 4 (int)
- set_linear_count(count: int)
- sensorless_estimator:
- error = 0x0000 (int)
- phase = nan (float)
- pll_pos = nan (float)
- vel_estimate = nan (float)
- config:
- observer_gain = 1000.0 (float)
- pll_bandwidth = 1000.0 (float)
- pm_flux_linkage = 0.0015800000401213765 (float)
- trap_traj:
- config:
- vel_limit = 2.0 (float)
- accel_limit = 0.5 (float)
- decel_limit = 0.5 (float)
- min_endstop:
- endstop_state = False (bool)
- config:
- gpio_num = 0 (int)
- enabled = False (bool)
- offset = 0.0 (float)
- is_active_high = False (bool)
- pullup = True (bool)
- debounce_ms = 50 (int)
- max_endstop:
- endstop_state = False (bool)
- config:
- gpio_num = 0 (int)
- enabled = False (bool)
- offset = 0.0 (float)
- is_active_high = False (bool)
- pullup = True (bool)
- debounce_ms = 50 (int)
- watchdog_feed()
- clear_errors()
- axis1:
- error = 0x0000 (int)
- step_dir_active = False (bool)
- current_state = 1 (int)
- requested_state = 0 (int)
- loop_counter = 5114087 (int)
- lockin_state = 0 (int)
- is_homed = False (bool)
- config:
- startup_motor_calibration = False (bool)
- startup_encoder_index_search = False (bool)
- startup_encoder_offset_calibration = False (bool)
- startup_closed_loop_control = False (bool)
- startup_sensorless_control = False (bool)
- startup_homing = False (bool)
- enable_step_dir = False (bool)
- step_dir_always_on = False (bool)
- turns_per_step = 0.0009765625 (float)
- watchdog_timeout = 0.0 (float)
- enable_watchdog = False (bool)
- step_gpio_pin = 1 (int)
- dir_gpio_pin = 2 (int)
- calibration_lockin:
- current = 10.0 (float)
- ramp_time = 0.4000000059604645 (float)
- ramp_distance = 3.1415927410125732 (float)
- accel = 20.0 (float)
- vel = 40.0 (float)
- sensorless_ramp:
- current = 10.0 (float)
- ramp_time = 0.4000000059604645 (float)
- ramp_distance = 3.1415927410125732 (float)
- accel = 200.0 (float)
- vel = 400.0 (float)
- finish_distance = 100.0 (float)
- finish_on_vel = True (bool)
- finish_on_distance = False (bool)
- finish_on_enc_idx = False (bool)
- general_lockin:
- current = 10.0 (float)
- ramp_time = 0.4000000059604645 (float)
- ramp_distance = 3.1415927410125732 (float)
- accel = 20.0 (float)
- vel = 40.0 (float)
- finish_distance = 100.0 (float)
- finish_on_vel = False (bool)
- finish_on_distance = False (bool)
- finish_on_enc_idx = False (bool)
- can_node_id = 0 (int)
- can_node_id_extended = False (bool)
- can_heartbeat_rate_ms = 100 (int)
- fet_thermistor:
- error = 0x0000 (int)
- temperature = 14.813278198242188 (float)
- config:
- temp_limit_lower = 100.0 (float)
- temp_limit_upper = 120.0 (float)
- enabled = True (bool)
- motor_thermistor:
- error = 0x0000 (int)
- temperature = 0.0 (float)
- config:
- gpio_pin = 4 (int)
- poly_coefficient_0 = 0.0 (float)
- poly_coefficient_1 = 0.0 (float)
- poly_coefficient_2 = 0.0 (float)
- poly_coefficient_3 = 0.0 (float)
- temp_limit_lower = 100.0 (float)
- temp_limit_upper = 120.0 (float)
- enabled = False (bool)
- motor:
- error = 0x0000 (int)
- armed_state = 0 (int)
- is_calibrated = True (bool)
- current_meas_phB = 0.6694726347923279 (float)
- current_meas_phC = 0.24526754021644592 (float)
- DC_calib_phB = -0.3872242271900177 (float)
- DC_calib_phC = 0.35895684361457825 (float)
- phase_current_rev_gain = 0.02500000037252903 (float)
- effective_current_lim = 10.0 (float)
- current_control:
- p_gain = inf (float)
- i_gain = nan (float)
- v_current_control_integral_d = 0.0 (float)
- v_current_control_integral_q = 0.0 (float)
- Ibus = 0.0 (float)
- final_v_alpha = 0.0 (float)
- final_v_beta = 0.0 (float)
- Id_setpoint = 0.0 (float)
- Iq_setpoint = 0.0 (float)
- Iq_measured = 0.0 (float)
- Id_measured = 0.0 (float)
- I_measured_report_filter_k = 1.0 (float)
- max_allowed_current = 60.75 (float)
- overcurrent_trip_level = 67.5 (float)
- acim_rotor_flux = 0.0 (float)
- async_phase_vel = 0.0 (float)
- async_phase_offset = 0.0 (float)
- gate_driver:
- drv_fault = 0 (int)
- timing_log:
- general = 17938 (int)
- adc_cb_i = 3482 (int)
- adc_cb_dc = 12870 (int)
- meas_r = 41396 (int)
- meas_l = 37817 (int)
- enc_calib = 44604 (int)
- idx_search = 34199 (int)
- foc_voltage = 63753 (int)
- foc_current = 19673 (int)
- spi_start = 2246 (int)
- sample_now = 1782 (int)
- spi_end = 5378 (int)
- config:
- pre_calibrated = True (bool)
- pole_pairs = 7 (int)
- calibration_current = 5.0 (float)
- resistance_calib_max_voltage = 2.0 (float)
- phase_inductance = inf (float)
- phase_resistance = 0.21308204531669617 (float)
- torque_constant = 0.006889999844133854 (float)
- direction = -1 (int)
- motor_type = 0 (int)
- current_lim = 11.0 (float)
- current_lim_margin = 8.0 (float)
- torque_lim = inf (float)
- inverter_temp_limit_lower = 100.0 (float)
- inverter_temp_limit_upper = 120.0 (float)
- requested_current_range = 60.0 (float)
- current_control_bandwidth = 1000.0 (float)
- acim_slip_velocity = 14.706000328063965 (float)
- acim_gain_min_flux = 10.0 (float)
- acim_autoflux_min_Id = 10.0 (float)
- acim_autoflux_enable = False (bool)
- acim_autoflux_attack_gain = 10.0 (float)
- acim_autoflux_decay_gain = 1.0 (float)
- controller:
- error = 0x0000 (int)
- input_pos = 0.0 (float)
- input_vel = 0.0 (float)
- input_torque = 0.0 (float)
- pos_setpoint = 0.0 (float)
- vel_setpoint = 0.0 (float)
- torque_setpoint = 0.0 (float)
- trajectory_done = True (bool)
- vel_integrator_torque = 0.0 (float)
- anticogging_valid = False (bool)
- config:
- gain_scheduling_width = 10.0 (float)
- enable_vel_limit = True (bool)
- enable_current_mode_vel_limit = True (bool)
- enable_gain_scheduling = False (bool)
- enable_overspeed_error = True (bool)
- control_mode = 3 (int)
- input_mode = 1 (int)
- pos_gain = 4.0 (float)
- vel_gain = 0.007499999832361937 (float)
- vel_integrator_gain = 0.0 (float)
- vel_limit = 300.0 (float)
- vel_limit_tolerance = 1.2000000476837158 (float)
- vel_ramp_rate = 1.0 (float)
- torque_ramp_rate = 0.009999999776482582 (float)
- circular_setpoints = False (bool)
- circular_setpoint_range = 1.0 (float)
- homing_speed = 0.25 (float)
- inertia = 0.0 (float)
- axis_to_mirror = 255 (int)
- mirror_ratio = 1.0 (float)
- load_encoder_axis = 0 (int)
- input_filter_bandwidth = 2.0 (float)
- anticogging: …
- index = 0 (int)
- pre_calibrated = False (bool)
- calib_anticogging = False (bool)
- calib_pos_threshold = 1.0 (float)
- calib_vel_threshold = 1.0 (float)
- cogging_ratio = 1.0 (float)
- anticogging_enabled = True (bool)
- move_incremental(displacement: float, from_input_pos: bool)
- start_anticogging_calibration()
- encoder:
- error = 0x0000 (int)
- is_ready = False (bool)
- index_found = False (bool)
- shadow_count = 2097 (int)
- count_in_cpr = 2098 (int)
- interpolation = 1.0 (float)
- phase = -2.733459711074829 (float)
- pos_estimate = 0.1279916763305664 (float)
- pos_estimate_counts = 2097.84375 (float)
- pos_cpr = 0.1280050277709961 (float)
- pos_cpr_counts = 2097.796875 (float)
- pos_circular = 0.12796497344970703 (float)
- hall_state = 7 (int)
- vel_estimate = 0.0 (float)
- vel_estimate_counts = 250.00001525878906 (float)
- calib_scan_response = 0.0 (float)
- pos_abs = 2098 (int)
- spi_error_rate = 0.0 (float)
- config:
- mode = 257 (int)
- use_index = False (bool)
- find_idx_on_lockin_only = False (bool)
- abs_spi_cs_gpio_pin = 4 (int)
- zero_count_on_find_idx = True (bool)
- cpr = 16384 (int)
- offset = -8589 (int)
- pre_calibrated = False (bool)
- offset_float = 0.3931249976158142 (float)
- enable_phase_interpolation = True (bool)
- bandwidth = 1000.0 (float)
- calib_range = 0.019999999552965164 (float)
- calib_scan_distance = 50.26548385620117 (float)
- calib_scan_omega = 12.566370964050293 (float)
- idx_search_unidirectional = False (bool)
- ignore_illegal_hall_state = False (bool)
- sincos_gpio_pin_sin = 3 (int)
- sincos_gpio_pin_cos = 4 (int)
- set_linear_count(count: int)
- sensorless_estimator:
- error = 0x0000 (int)
- phase = nan (float)
- pll_pos = nan (float)
- vel_estimate = nan (float)
- config:
- observer_gain = 1000.0 (float)
- pll_bandwidth = 1000.0 (float)
- pm_flux_linkage = 0.0015800000401213765 (float)
- trap_traj:
- config:
- vel_limit = 2.0 (float)
- accel_limit = 0.5 (float)
- decel_limit = 0.5 (float)
- min_endstop:
- endstop_state = False (bool)
- config:
- gpio_num = 0 (int)
- enabled = False (bool)
- offset = 0.0 (float)
- is_active_high = False (bool)
- pullup = True (bool)
- debounce_ms = 50 (int)
- max_endstop:
- endstop_state = False (bool)
- config:
- gpio_num = 0 (int)
- enabled = False (bool)
- offset = 0.0 (float)
- is_active_high = False (bool)
- pullup = True (bool)
- debounce_ms = 50 (int)
- watchdog_feed()
- clear_errors()
- can:
- error = 0x0000 (int)
- config:
- baud_rate = 250000 (int)
- protocol = 0 (int)
- set_baud_rate(baudRate: int)
- test_property = 0 (int)
- test_function(delta: int)
- get_oscilloscope_val(index: int)
- get_adc_voltage(gpio: int)
- save_configuration()
- erase_configuration()
- reboot()
- enter_dfu_mode()
コメントを残す