瀬戸内ROS勉強会(第1回)を開催しました

美観地区 
もちろん、昨年のROSConJPのTシャツ
5/12(日)に瀬戸内ROS勉強会第1回を開催しました。myasuさんと一緒に瀬戸内ROS勉強会の運営をやっております。
会場は倉敷美術館でした。
倉敷の町並み、美観地区の白壁の雰囲気は良いですね!
京都よりTAKASE hideki先生をお呼びして、ROS1とROS2の違いなど、お話していただきました。
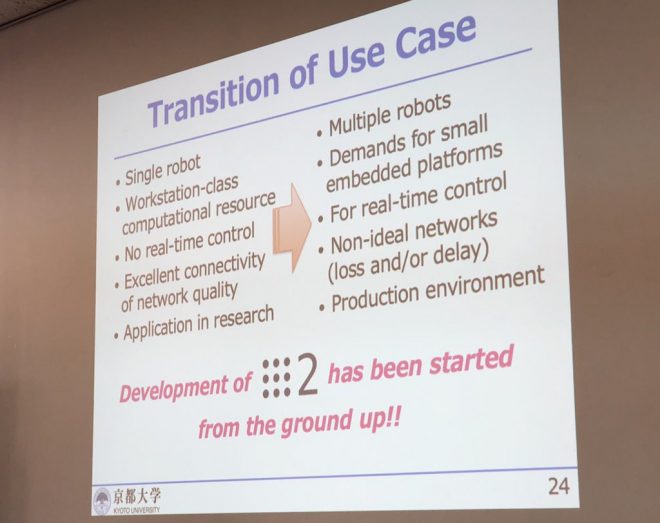
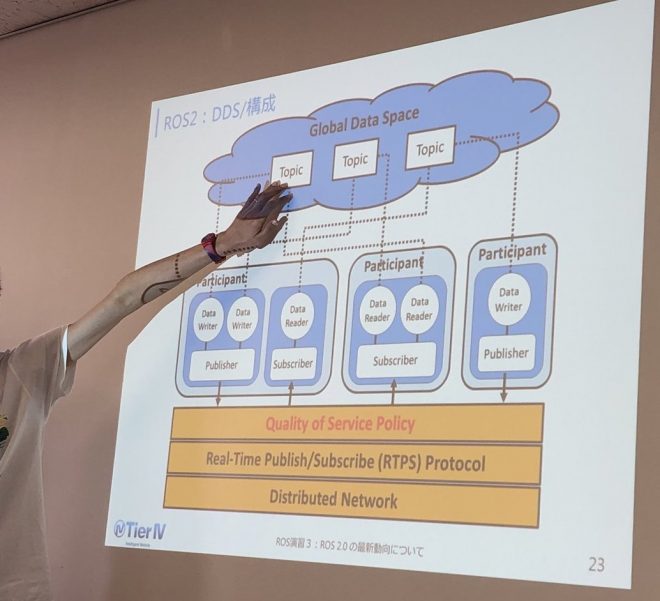
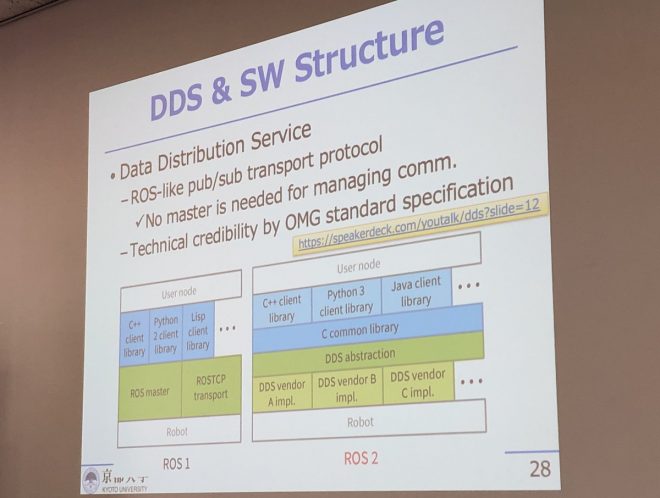
ROS2では、roscoreがなくなって、DDSを用いることによって、通信のデータ品質が保証されるということ。これは良いですね。そして、大きな違いですね。
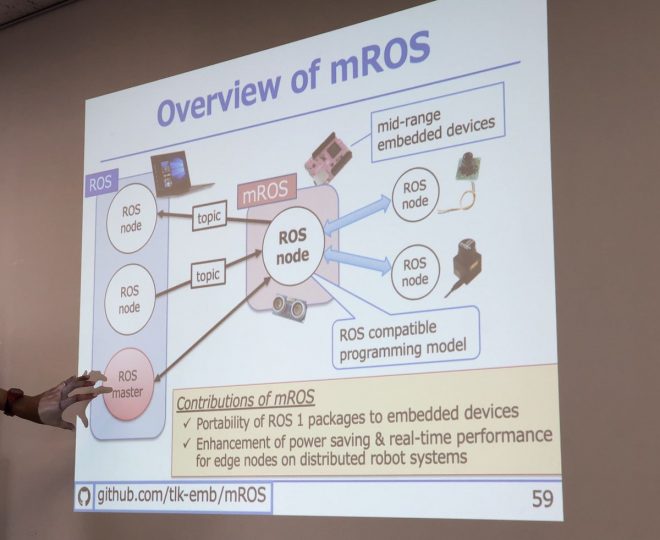
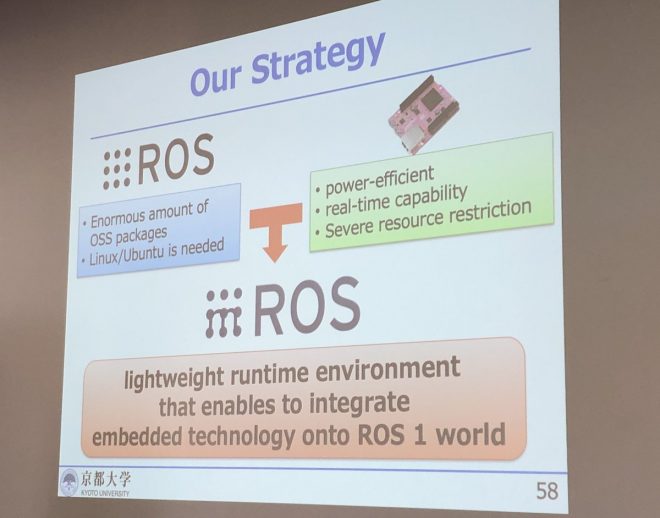
TAKASE先生の開発されている「mROS」の紹介、「mROS」は、PIC以上かつRaspberryPi以下の、Linuxが走らないくらいのミドルレンジの組み込みボード向けだそうです。


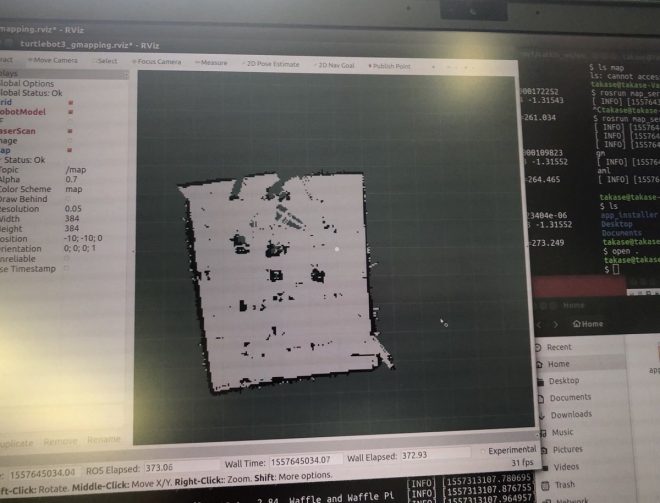
TAKASE先生の持ってこられたTurtlebot3でのデモンストレーションを見せていただきました。
Turtlebot3に搭載されたLIDARのデータを用いて、会場の教室を計測してマップを生成されていました。
こんな簡単にマップ生成出来るんですね!
非常に得るものの多い勉強会でした。
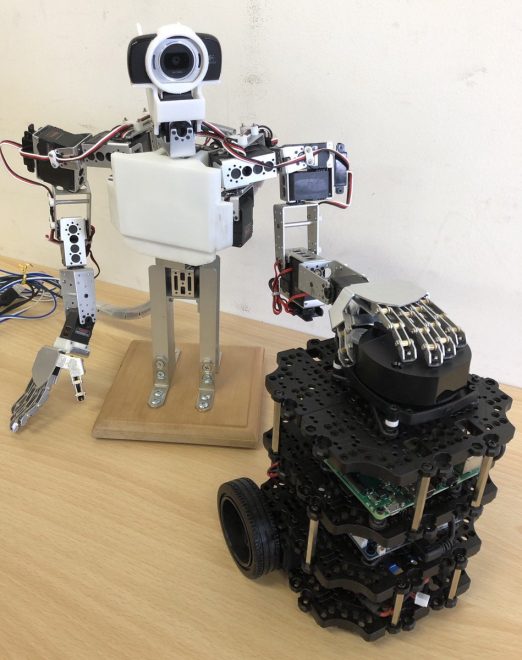
さて、第2回は”もくもく会”ということで、実際にロボットを作っていきます。
ちなみに、当日のLTのネタも貼っておきます。
コメントを残す