Dynamixel AX-12 の制御は大変!?
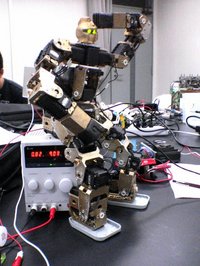
学校で、安定化電源を借りました。
モーション作りに電池だとすぐなくなるんで・・・。
2A出るやつなんですが、待機時にすでに0.8A食ってます。
・・・ということは。
案の定。
モーションやるとすぐに2A突破して電圧が下がり始めました。
「屈伸」をやらそうとすると5V切ってマイコンリセットwww
ん〜、みなさんはAX−12は何Vで動作させているのでしょう。
うちは、バイオロイド純正のバッテリーを3つで使いまわしています。
やはり軽いリポなんかがいいんですかね。
そして、AX−12のモーションはどうやって作っているのでしょう。
というか、みなさんのロボットのモーションの作り方って気になりますね。
うちは、とりあえず全サーボに512を送って、ターミナルでサーボを1つずつ制御して、「いい!」と思ったところで、データを取っています。
これは、教示機能が使えないKONDOのサーボを使ってたときのプログラムを移植したものなんですが・・・。
バイオロイドはポジションキャプチャできますが、剛性がないのであんまり意味がないような・・・。
などと考えて実装していません。
実は、屈伸すら出来ない状態で・・・。
トルクが足りてない気がするんだけど!?
なんか、今週末が大会なんで、結構焦ってますね;;
その焦りぶりを日記で表現してみましたww
では!w
コメントを残す