なんてこった
お久しぶりです。
明日、ダイハツのイベントでKUMACOを動かすことになっていたんですが・・・。
三月兎姐さんも来るということで、気合いれて徹夜のつもりだったのですが・・・。
寝ぼけてVS-RC003 HVに刺さったアルインコの電源がプリセットになってるのに気づかず13V流してしまった。
基板は問題ないのだけど、問題はつながってるサーボがHSR-8498HBであること・・・。
全身から煙が出てますよ・・・(汗
あと7時間・・・。
どうするオレ;;
ノーマルのG-Robot持って行ってごまかすか・・・;;
これは、自分のロボット史上最大の失敗かもしれないorz
—
追記
壊れたサーボは運よく3つに留まった。
予備が4つあったので、ギリギリセーフ。
CPUボードを換えてから遊びのモーションはいくつか作ったけど、最終的に主要な動きは前回同様シンプルファイター式のマスタースレーブでくみ上げた。
VS-RC003でマスタースレーブやるにはCPUの設定をひたすら使う。
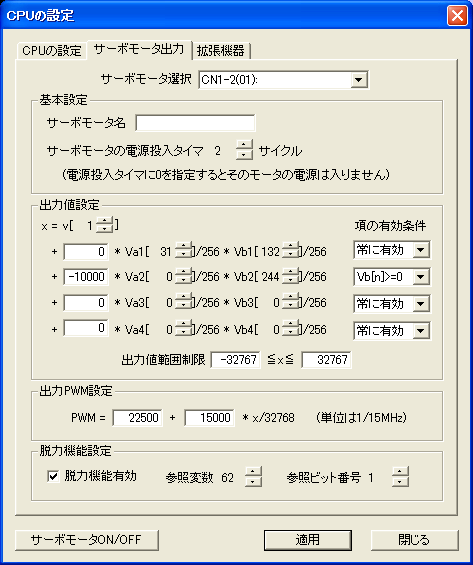
各サーボの出力の式にコントローラの変数を足しこんでいく。
条件分岐のみで、マスタースレーブを使ってかなりの動きが出来るはず。
逆に言うとモーションを作らなくてもCPUの設定だけでロボットが動くってことです。
KUMACO的手抜きモーション・・・。
まぁ、軸数が少ないから出来るんでしょうが・・・。
とはいえ、やっと、前のSH2の自作ボードで作っていたトコロに追いついてきた。
音声機能は・・・間に合わないなー。
というか、起き上がりモーション出来てないorz
コメントを残す