ロボゴング14
昨日はロボゴング14(OCTものづくり館)におじゃましてきました!
ロボカントリーIVの翌日で、カントリー終了後にフェリーに乗りこんで一路大阪へという強行スケジュールで、相方と二人でなんとか参加してきました。
今回は過去最大のエントリー数ということで、実際振り上げた手が大変なことになってます。

今回は久々のKUMACOでエントリー。
集合写真は兎角とレグホーンの近くでプチケモノゾーンが出来てますw

行きのフェリーの中で徹夜でモーション作り&思いつきで「操作マップv1を操作マップv2に変更する」という大胆なことをしてしまったため第一試合で音声ファイルを書き込み忘れ、無音のKUMACOになってしまいましたw
2×2からは音声ファイルも復活してちょっぴりパワーアップしたKUMACOになりました。
「操作マップv2」になって割り込みが標準で出来るので、起き上がりの前後を間違って実行した場合でも取り消せるのがすごく便利になりました!
裏方では久しぶりにあゆちゃんと再会しました。
友達のりっちゃんも来ていてウチの相方と記念撮影していました。

そしてちょっぴりテンションの上がる1枚。
A4氏の子テルル。
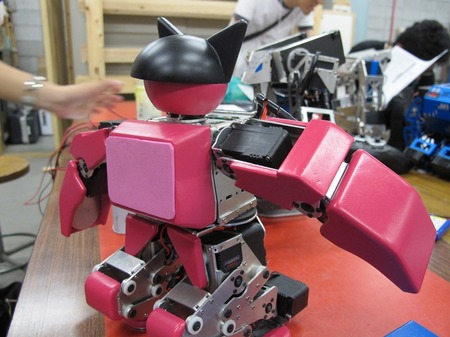
こういう可愛いロボットは好きですね。てか売り物かと思ってしまいました。
技術もしっかり詰まってて、テンション上がります。
どうやらお金もかなり詰まってるみたいですが(笑)
このサイズのリンク脚、是非KUMACOの次のネタに頂きたいなとw
そして、以前からだうとさんにお願いしていたDVD。
控室でこっそりと、若かりし頃のみなさんを楽しませていただきました。
大会終了後は、あゆちゃんファミリーにご馳走になってしまいました。
相方共々お世話になりまして、本当にありがとうございました!
今回も大阪のロボビルダーの皆さんの温かさと、ロボットに対する熱さと、いろいろ感じられる大会でした。
学生さんのロボット製作の意気込みもすごいなと思います。頑張ってください!
お疲れ様でした!ロボッファイトッ!
こんばんは。
すごい楽しそうですね。
どのロボットも個性があって、どうやって動かしているのかがきになります。
それとなんですが、六輪ロバーの旋回方法はサーボを同時に4個動かしていると思うのですが、マイコンによる方法ではなくて、コントローラを使用していると思うのですが、マイコンを使用しないで、同時にサーボを4個動かす方法を是非教えて頂きたいのですが。
正直車輪のモータの回転数を計測して、それを元に回転数をコントロールするので精一杯な感じなんです。
ありがとうございます。
機会があれば是非ロボットイベントに参加するのも面白いですよ。
さて、サーボの制御ですが、実はマイコンを使ってます。「VS-RC003」というロボット用のコントロールボードを利用しているのですが、CPUは60MHzクロックでROM 512KBなのでそこそこ高速なボードです。
これでコントローラー、サーボモーター共にマイコンで制御しています。
6輪のモーターにもそれぞれ小さなマイコンを使っているので、実は1+6の7CPUという構成だったりします。
マイコンを使用しないで同時にサーボを4個動かす方法ですが、旋回だけならラジコン用のサーボコントローラーにサーボを並列接続すれば出来ないことはないと思います。
内部にプログラムが出来るサーボを利用すれば同じ信号で回転方向を変える事もできます。(KONDO社のサーボとか)
とは言え、サーボコントローラーを使うと独立してサーボを制御できないので、やはりマイコンを使うのがベストとは思います
あと車輪の回転数の制御に既にマイコンを使っているようであれば余っているシリアルポートで、シリアルサーボモーターを利用する手もありますね。