ロボット技術
RPU-10で秋月ジャイロセンサ #02
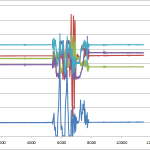
前回のジャイロの積分をとりあえず、ロボットの足首にフィードバックするプログラムを作ってみた。 実行した様子はこちら 積分誤差で完全に足がずれています。 この原因をネットで調べていたら、「実装されている微分回路は時定数がか […]
RPU-10で秋月ジャイロセンサ #01
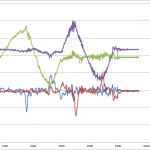
ロボットの姿勢制御のセンサといえば、定番は加速度センサとジャイロセンサです。 RPU-10には加速度センサ が内蔵されているのですが、秋月に村田製作所のジャイロが400円で出ていたので、思わず購入してみました。 サイズは […]
ExcelWalkerのアルゴリズムを移植しました。
タイトルの通りなのですが、「サーボの通信」「逆運動学」「コントローラー通信」をベースはすべてそろったので、ExcelWalkerの歩容のアルゴリズムをCで書き直しました。 実行した様子はこちら 制御周期は、だいたい18m […]
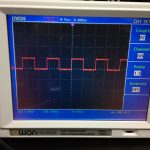
RPU-10でサーボ通信(ロングパケット)の速度
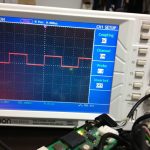
シリーズ化しつつありますが、20個サーボへのロングパケットも実測で速度を測ってみました。 こちらは10msec弱といったところでしょうか。 115200bpsで(100+α)byte送っているので、 かなりアバウトですが […]
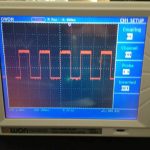
RPU-10でパッド情報読み取りの速度
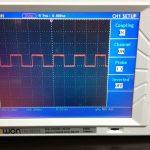
逆運動学の時と同じ方法でコントローラーからの読み取り時間を計測してみた。 だいたい500μsecといった所でしょうか。 SISOさんの記事に0.5msecと書いてあったので間違いないでしょう。 結構、高速ですねー。
RPU-10で6軸逆運動学の計算と速度
さっそくRPU-10(内部はATmega128)をGDLにてプログラムしてみました。 ザックリ移植したんで、変数名がへっぽこなのはご勘弁ください。 何をしたかというととりあえず、RPU-10のスペックが知りたかったので、 […]
Windows(64bit)環境にてGDLでRPU-10プログラミング

最近、再び弄りだしたG-Robotsですが、GCC Developer Lite(以下、GDL)を使って、Excel Walkerのプログラムをベタで移植したいなーなどと思ってます。 ただし、RPU-10のターゲットが含 […]
KUMACOの設計『Ver.5へ』

船場ロボットファッションコンテストへむけてKUMACOを大改修中。 重量が増えても、ちゃんと舞台で歩けるように、とうとう膝軸を追加することにしました。 Meros、KUMACO、と、いろいろ膝なしロボットを作ってきました […]
3-5軸立体平行リンク足コンセプト #02
昔、ちょっとだけ描いて放置してた、立体平行リンク。 思い出したように、お絵かき更新。 “細すぎる”とかの強度は度外視のコンセプトモデル。 7サーボで、ヨー軸ありの逆キネも可能。 実際作るとなると、 […]
ロボコンマガジン5月号に掲載(予告)
Amazonにリンクが出来ていたのでご紹介。 3月号のロボコンマガジンの予告をご覧になった方はお気づきかも知れませんが、5月号に「ぬいぐるみロボット」の記事を書かせていただきました! いつもは、新しい衣装を作ったら真っ先 […]