GROBOTS
RPU-10で秋月ジャイロセンサ #04

ジャイロの補正に関しては一般的に足首のロールとピッチに即値を加算する制御が多いかと思います。 前に某Dさんに聞いたときは膝サーボにも補正を効かせたりいろいろ工夫されているようだったのですが、僕も足首だけじゃなくせっかく6 […]
RPU-10で逆キネ計算歩行
ExcelWalkerを更に進化させてRPU-10に移植してみました。 自転しながらの周回は、なんとなく計算歩行が出来たらやってみたいなーと思っていましたw まだまだ、改善点も多数あるので今後さらにブラッシュアップしてい […]
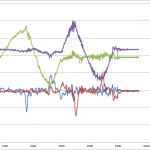
RPU-10で秋月ジャイロセンサ #03
計算歩行に微分回路をカットした秋月ジャイロを足し合わせてみました。 すごく安定して歩行しています。 あと、歩行の体重移動のアルゴリズムも少し変えました。 変えたというか、大学時代にKOKUTENで使ってた円運動の方法を移 […]
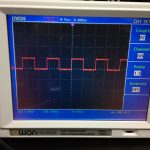
RPU-10で秋月ジャイロセンサ #02
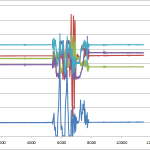
前回のジャイロの積分をとりあえず、ロボットの足首にフィードバックするプログラムを作ってみた。 実行した様子はこちら 積分誤差で完全に足がずれています。 この原因をネットで調べていたら、「実装されている微分回路は時定数がか […]
RPU-10で秋月ジャイロセンサ #01
ロボットの姿勢制御のセンサといえば、定番は加速度センサとジャイロセンサです。 RPU-10には加速度センサ が内蔵されているのですが、秋月に村田製作所のジャイロが400円で出ていたので、思わず購入してみました。 サイズは […]
ExcelWalkerのアルゴリズムを移植しました。
タイトルの通りなのですが、「サーボの通信」「逆運動学」「コントローラー通信」をベースはすべてそろったので、ExcelWalkerの歩容のアルゴリズムをCで書き直しました。 実行した様子はこちら 制御周期は、だいたい18m […]
RPU-10でサーボ通信(ロングパケット)の速度
シリーズ化しつつありますが、20個サーボへのロングパケットも実測で速度を測ってみました。 こちらは10msec弱といったところでしょうか。 115200bpsで(100+α)byte送っているので、 かなりアバウトですが […]
RPU-10でパッド情報読み取りの速度
逆運動学の時と同じ方法でコントローラーからの読み取り時間を計測してみた。 だいたい500μsecといった所でしょうか。 SISOさんの記事に0.5msecと書いてあったので間違いないでしょう。 結構、高速ですねー。
人力ジャイロセンサー!

RCIVの同窓会(!?)から、センサの興味が冷めやらぬまま、Facebookで見かけた吉村さんのジャイロ制御の動画のパクリをエクセルで実装してみる。 とはいえ、肝心のセンサがないので、人力センサー(コントローラー)で対応 […]
G-ROBOTSオーバーホール!
金曜土曜と仕事で東京に出張していたのですが、帰ってきてG-ROBOTSをオーバーホールしました。 交換パーツは腰と腕。サーボの反対軸が折れました。 もう4年以上稼働して大会にも相当出場しているのですが、その間壊れたサーボ […]