上半身ロボット
Dynamixel Workbenchを触ってみた #05

すみません。夏から作る方に忙しくなって、ブログにまとめる作業が全然出来ていないまま、2020年を迎えてしまいました。本年もよろしくお願いします。 さて、昨年後半は、前回(#04)から後、実際にサーボを5軸使った上半身ロボ […]
Maker Faire Kyoto 2019に参加しました

Maker Faire Kyoto 2019に参加しました。瀬戸内の電子工作サークル「えれくら!」のブースで出展してきました。Makerイベントは初参加&初出店でした。 出店された皆さん、参加された皆さん、お疲れ様でした […]
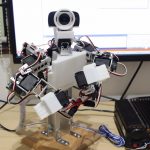
上肢帯のあるロボット7

ちょっと間が空きましたが、上肢帯のあるロボットの続きです。 頭部にカメラを搭載しているので、”OpenCVを用いた○○”とか、”ROSを用いた○○”とか、いろいろロボットら […]
上肢帯のあるロボット6

サーボ全体(ID:0xFF)で、返信要求をして一気に全サーボの情報を読み取る作戦ですが… 先週の時点で、”350μsecずつずらして、それが最適値”、という話だったのですが、時々チェックサムエラー […]
上肢帯のあるロボット5

毎週少しずつアップデートを重ねている”上肢帯のあるロボット”ですが、 先週、制御周期がWindowsの上限で20Hzが限界かも、と書きました。 これは、1往復につきドライバの問題で2msecのディ […]
上肢帯のあるロボット4

上肢帯ロボット、今週は、ひたすらコーディング。 2つほど、発見がありました。 1.双葉サーボのボーレートの謎 RS303/304のマニュアルによると、RS304の標準のボーレートは、115,200bpsに設定されている。 […]
上肢帯のあるロボット3
先週1週間の進捗です。 仮組みまで完了していたので、次は配線ですが、RS306サーボを接続するにあたって、”連結ハブ”と”直結ハブ”を自作しました。 おそらくサーボの3ピン […]
上肢帯のあるロボット2

上肢帯のあるロボット、設計を進め、とりあえず仮組みまで出来ました。 配線まで追いついていませんが、とりあえず、動作範囲等は確認できます。 子供にも見せながら遊んでみました。 KUMACOと記念写真。 KO-Link2とも […]
上肢帯のあるロボット

これは2007~2008年に、自分が大学4年の学部の卒論用に作った機体です。 研究自体は恥ずかしくて載せられませんが、使用したロボット自体は少し拘っていて、よりヒトの動きに近いことをやりたかったため、「上肢帯」を模した機 […]
VisualStudioでAIMOTOR その2

とりあえず、キャプチャーも出来る用になった。 手前のモーターの角度を取得して、奥のモーターに指示する。 前に、Hitecのサーボでやったのと同じようなもの。 https://youtube.com/watch?v=oRM […]