ロボット製作
人力ジャイロセンサー!

RCIVの同窓会(!?)から、センサの興味が冷めやらぬまま、Facebookで見かけた吉村さんのジャイロ制御の動画のパクリをエクセルで実装してみる。 とはいえ、肝心のセンサがないので、人力センサー(コントローラー)で対応 […]
KUMACO ver5 動作テスト

KUMACOのモーションを作成。 片足バランスは健在! 構造上、屈伸が最大8mmしか落ちないので、軸足のサーボの保持力不足で、ほとんどすり足歩行に。 逆運動学ではなくアナログミキシングの歩行です。 あと机上のレベルが取れ […]
KUMACOver.5.00のハード完成
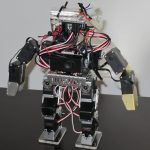
配線と火入れを行いました。 コネクタのハンダに、初めてクリップ付のルーペを使ってみました。 コレ、すごく便利ですね。 というわけで、完成したのKUMACO ver.5.00 これからプログラミングに移ります。
KUMACOの新しい下半身 #05

すべての部品がそろったので組み上げました。 新旧比較するとこんな感じです。 脚の長さはほぼ同じですが、サーボが小さいのでシュッとしてます。 膝2軸増えましたが、重量は減りました。 KUMACOも出来た当初は13軸で総重量 […]
KUMACOの新しい下半身 #04

新しいKUMACOの足裏です。 足裏は、布以外の材質で、唯一KUMACOの外に出る部品です。 そんなこんなで、”透明”なアクリルのこだわりがあるのですが、アクリルの加工はアルミ以上に大変なんですよね。 穴開けると熱で溶け […]
KUMACOの新しい下半身 #03

いったんバラして、サーボの3本平行線を50cmに取り替え。 ケーブルの根元にチップコンデンサが付いてて、たぶんノイズキラー用だと思うのですが、飛ばさないようにハンダするのに緊張感がありました(笑) とりあえず組み立て前に […]

KUMACOの新しい下半身 #01

アールティさんとVstoneさんが頑張ってくれたおかげで、KUMACOの下半身のフレームがそろってしまいました。 直交軸用のブラケットはちょっと可変的な使い方をするので、手直しが必要ですね。 足裏用のアクリル部材も週末に […]
Vstone切削発注
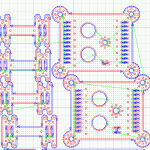
結局こんな感じで切削を発注。 朝にDXFを送って、夕方には発送完了メールが。 Vstone仕事早っ! ちょっと隙間がもったいないけれど、iPhoneのスタンドは4つ作る予定です。
KO-Linkの肩の直交軸

しばらく前にFaceBookには投稿していたのだけれど、改めてブログに。 KO-Linkの肩の軸を再検討中。 逆運動学のためには最低2軸直交していれば、位置の制御的にはOKなのだけど、手の制御の場合、脚の制御以上に”機能 […]