ロボット製作
RPU-10で逆キネ計算歩行

ExcelWalkerを更に進化させてRPU-10に移植してみました。 自転しながらの周回は、なんとなく計算歩行が出来たらやってみたいなーと思っていましたw まだまだ、改善点も多数あるので今後さらにブラッシュアップしてい […]
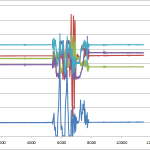
RPU-10で秋月ジャイロセンサ #03
計算歩行に微分回路をカットした秋月ジャイロを足し合わせてみました。 すごく安定して歩行しています。 あと、歩行の体重移動のアルゴリズムも少し変えました。 変えたというか、大学時代にKOKUTENで使ってた円運動の方法を移 […]
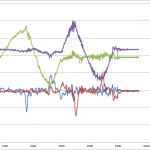
RPU-10で秋月ジャイロセンサ #02
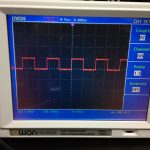
前回のジャイロの積分をとりあえず、ロボットの足首にフィードバックするプログラムを作ってみた。 実行した様子はこちら 積分誤差で完全に足がずれています。 この原因をネットで調べていたら、「実装されている微分回路は時定数がか […]
RPU-10で秋月ジャイロセンサ #01
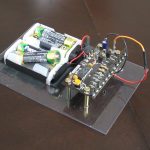
ロボットの姿勢制御のセンサといえば、定番は加速度センサとジャイロセンサです。 RPU-10には加速度センサ が内蔵されているのですが、秋月に村田製作所のジャイロが400円で出ていたので、思わず購入してみました。 サイズは […]
ExcelWalkerのアルゴリズムを移植しました。
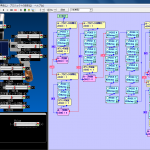
タイトルの通りなのですが、「サーボの通信」「逆運動学」「コントローラー通信」をベースはすべてそろったので、ExcelWalkerの歩容のアルゴリズムをCで書き直しました。 実行した様子はこちら 制御周期は、だいたい18m […]
RPU-10でサーボ通信(ロングパケット)の速度
シリーズ化しつつありますが、20個サーボへのロングパケットも実測で速度を測ってみました。 こちらは10msec弱といったところでしょうか。 115200bpsで(100+α)byte送っているので、 かなりアバウトですが […]
RPU-10でパッド情報読み取りの速度
逆運動学の時と同じ方法でコントローラーからの読み取り時間を計測してみた。 だいたい500μsecといった所でしょうか。 SISOさんの記事に0.5msecと書いてあったので間違いないでしょう。 結構、高速ですねー。
第3回船場ロボットファッションコンテスト

先日の投稿、「○○○○○」の答えは、「チアダンス」です! 船場のロボットファッションコンテスト、ハロウィーンとチアダンスをテーマに、出場させていただきました! 音楽はAQUAの「CARTOON HEROES」を使用しまし […]
ハロウィーンっぽい小道具
船場ロボットファッションショー用のモーション製作も進んできましたが、小道具も用意しないといけません。 たまたまエレホビーのNT-6流星フラッシャーという基板が出てきたので再利用することにしました。 動かすとこんな感じ。 […]
モーション三昧
船場ロボットファンションコンテスト用のKUMACOのモーションを作成しました! 1分のモーションに7時間かけました。 モーションファイル作りにこんなに時間をかけたのは久しぶり。 嫁が振り付けを作って、動画に撮影し、その動 […]