ソフトウェアにより割り込みでの、サーボ制御について考えてみた。
LBC作者のバーニング宮田さんのところの記事では、ソフト制御ではジッターが大きくそのため、3to8ラインデコーダーとラッチ回路を使って〜〜っていう説明になっている。
確かに、ジッターがあると、制御うんぬんもそうだが、消費電力も大きく変わる。
ただ、前に中村博士とお話させていただいたときは、「ソフトでOKだよ」って話になった。
たぶん、ソフト制御でもちゃんとジッターのことを考えた上で組んだ制御なら問題ないのだろう。
用は技量。
ちなみに、うちのサークルで使ってる僕の作った基板もソフト制御。
現在はサークルのロボットのサーボがAX-12にシフトしているのだが、後輩が使っているため、余計にちゃんと実験をしたいと思った。
とりあえず、ジッターを図ってみた。
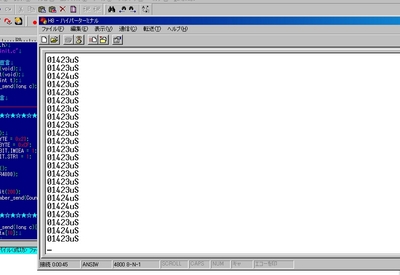
サークルでジャイロの値を読むために作ったITUのインプットキャプチャのプログラムを流用してみた。
微妙にジッターが出てるのが分かるが、最大で1μsくらい上下に出るようだった。
だいたい600μs〜2200μsくらいの値で、動くサーボにとって2μsのジッターはどれくらいの影響がでるものか。
だいたい0.3度弱くらい。
反応のいいサーボならプルプルしてしまうだろうか・・・。
たしかにRobovie-MSのサーボだと少しジッター出てます。
KONDOの2144だとそんなに分からないんですが・・・。
ジッターで反応するかどうかってのはサーボ次第ってところでしょうか。
GWSのS03T/2BBとかだと、絶対反応しない気がします。
ん〜、SCIで受信割り込みかける限りはこれが、限界なんだろうか・・・。














最近のコメント