
顔を ”泉 こなた” 風にしてみた・・・。
わかり難いネタでごめんなさい。m(_ _)m
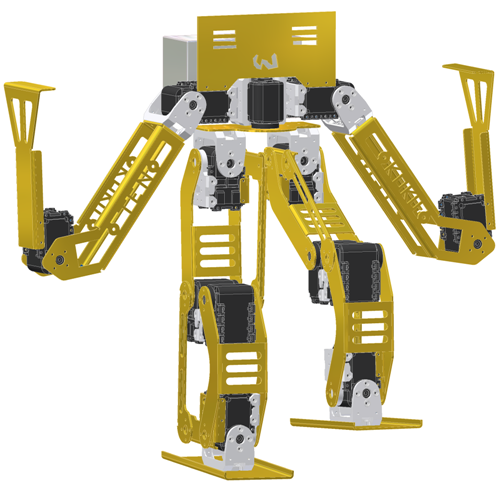
ここまで、作っておいて「今更外装のないロボットを作るのは・・・」とか、考えてしまってどうしようか悩んでしまったり。
少し古いロボコンマガジンを読んでいてバイオロイドのCM-5の使い方のコーナーがあったことに気づいた。
がむしゃらにSH2で制御する方法ばかり考えていたけれど、CM5とAX-S1を用いて、いろいろ遊んでみようかなぁと思ったり。
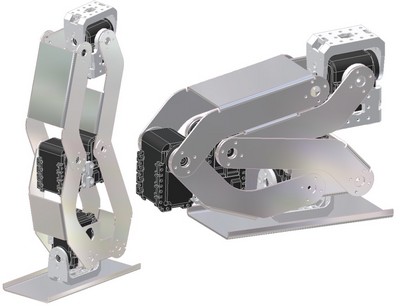
そうなると、アルマイト加工はやりすぎ?
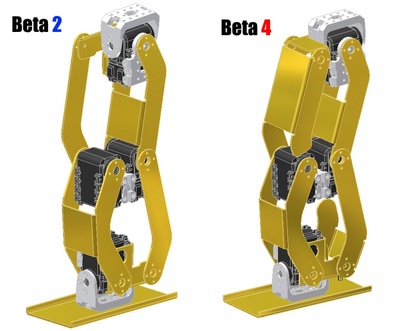
とりあえず、このロボットはバイオロイドを遊びつくす最後の段階として作って、AX-12を使い潰してみようかなぁと思ってます。
・・・だが、今はホントにしなければならないのはKUMACOのシナリオを作るためのプログラム作り。
ROBO-ONEまでの日数は刻一刻とせまってる〜〜〜〜!














最近のコメント