
今まで、CM-5のプログラミングはBioloidソフトウェアを利用して製作していました。
このBioloidソフトウェアがすごくやっかいなやつで、
- モーションデータはCM-5上にしか記憶されない
(手元のPCにバックアップは作成されない) - 教示機能でモーションを作る時、トルクオフがすべてのモーターに反映される
などなど、とーーーっても使いづらく、電源切ったらデータが消えて「あーーー!」なんてのも日常茶飯事、モチベーション的にとってもゲンナリするソフトでした。
それが、ふと韓国のROBOTISのサイトを見ていたらRoboPlusなるソフトウェアが提供されているとのこと。
国内の販売元のベストテクノロジーで案内(再配布等)されていなかったんで、完全に見落としていました。
もともとは、バイオロイドプレミアムキットとOLLO用のソフトウェアのようですが、CM-5もRoboPlus上でフォーマットすれば動作するようです。
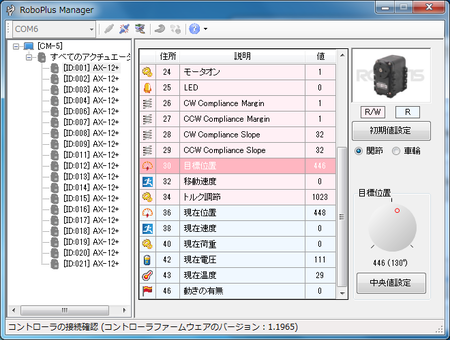
まず、「RoboPlus Manager」。
今まで、マネージモードでコマンドでしか設定できなかったアクチュエータの内部設定がGUIで簡単に出来ます。
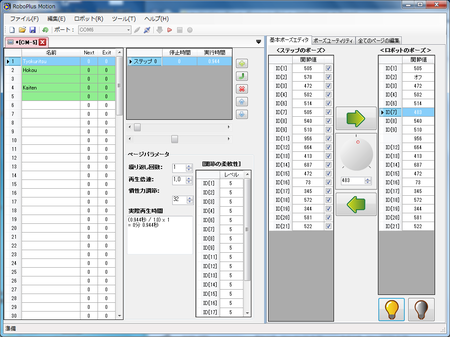
次に、モーションエディターの「RoboPlus Motion」
これも、実行時間が「秒」で表示されるようになったり、アクチュエータ1個単位でトルクのON/OFFが設定できるようになったり、手元にモーションデータを保存できるようになったりかなり便利になってます。
最後にプログラム作成のための「RoboPlus Task」
C言語ライクの言語体系なのですが、条件分岐や関数など、結構いろいろ出来る上にモーションは、「RoboPlus Motion」にて制作したモーションを1行呼び出しで完了。
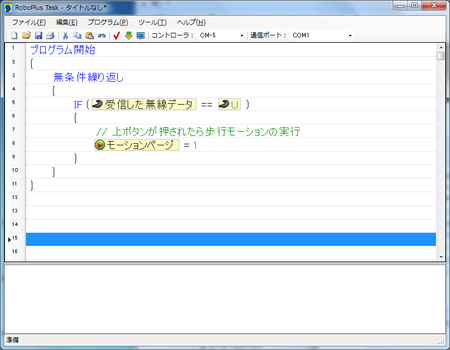
正直ここまでの機能があれば、プログラム製作のストレスもありませんし、自立制御のそこそこ長いプログラムも書けそうです。
あくまでも以前のモーションエディターと比べての話なので、このエディターでベストとは思いませんが、他社のボードとも戦えるレベルにはなってますね。
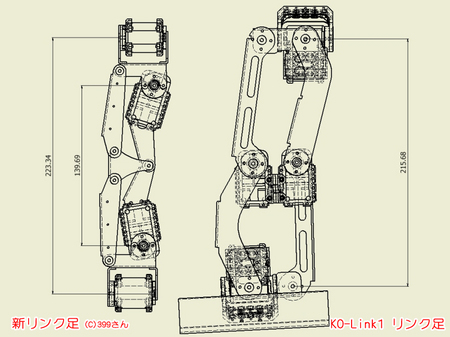
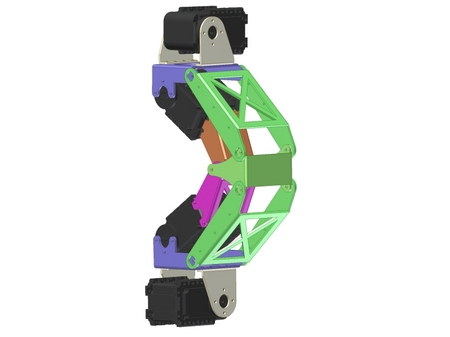
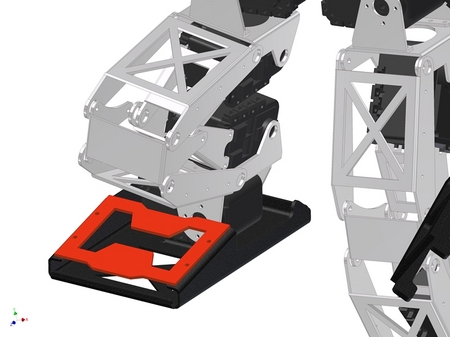
KO-Link2はこれでプログラムする予定です。
ちなみに、更に詳しいRoboPlusの使い方はこちら。
このソフトが、ただでさえ少ないDynamixelユーザーの追い風になればと思います。(今更w)

















最近のコメント