
399さんに頂いたリンク足を逆運動学で制御するために計算してみたので、備忘録として公開します!
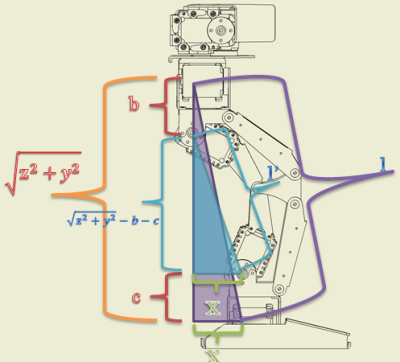
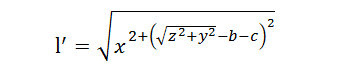
ちなみに三角形2個に注目してl’を計算するのがポイントです。
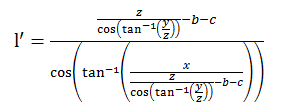
これに気づかずに、三角関数でゴリ押ししていると下記の状態になってドツボにハマってましたww
そもそもあっているかどうかも謎w
あと、
- KHR-1の場合
- KHR-1をダブルサーボにした場合
- アキレスの場合
- RB-2000の場合
ってのも、応用編で考えてあるんで後々UPしていけたらと思います。
これで一通りのロボットは網羅できるか!?
ただなんといっても、直交に比べると計算量が増えるわけで、計算量と足の構造の関係で論文書いたら1本書けるんじゃないかとw









