
いつも新しい設計を考えるにあたって関節の直交化を考えていたのですが、399さんからデータを貰ってある事実に気が付きました。
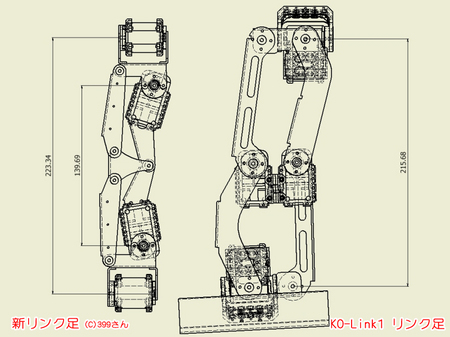
それは、直交化にこだわり過ぎて、ピッチ軸間の距離を取り過ぎていたこと。
「足の長さ」じゃなくて、「ピッチ間の距離」でモーメントが変わるという単純でかつ、あたりまえのことを今まで忘れて設計していたようです。
屈伸でヘタるのは単純にトルク不足だったようで、他人の設計に数字を入れて見てみると意外といろんな発見があって面白いですね。
ちなみに全体のロール軸間の距離はほとんど変わってません。
当然、しゃがんた時の最大変位が小さくなる点と、膝の角度が深くなるのでルール上しゃがみ判定がシビアになるという欠点はありますが、モータにかかる負荷モーメントはこちらのほうが少なくて有利ですね。
あと、制作時からなんとなく気づいてはいたのですが、KO-Link1の平行リンクが実は平行になってなかった件(爆









