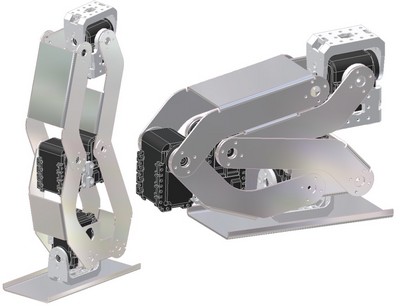
CADで設計してから制作する流れが普通ですが、制作済みのロボットをCAD化してみましたw
KUMACOと同じで、部分単位の設計はしてたのですが、全体設計していなかったので今さらですが・・・。

まぁ、またちょこっといじってみようかなーと。

CADで設計してから制作する流れが普通ですが、制作済みのロボットをCAD化してみましたw
KUMACOと同じで、部分単位の設計はしてたのですが、全体設計していなかったので今さらですが・・・。
まぁ、またちょこっといじってみようかなーと。
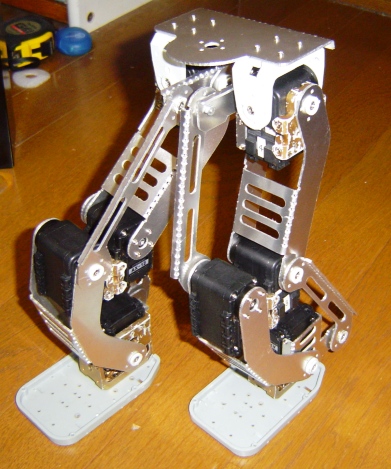
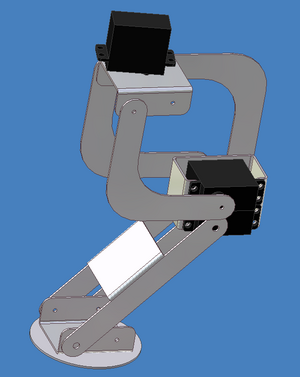
数年前にKOKUTEN用にROBO-ONEのレギュレーションで設計した足を使ていましたが、デモ用の機体なので今さらレギュレーションに縛られることもないよねってことで、足裏巨大化しました。
60mm×100mmから100mm×150mmにアップです。
(写真は新旧比較)

モーションそのままだと、足上がってないw
けど、転ばないロボットって楽しいな。
ROBOCountryIVはこれのプログラムちゃんと作って持っていきます。
あと、KUMACOとロッカー・ボギーも間に合えば・・・。(よくばり過ぎかな。
せっかくなのでステッカーも紹介。
使ってるパーツのメーカーのロゴを勝手に使用♪(いいのかな
頭部は適当にガンダムロゴフォントを使用
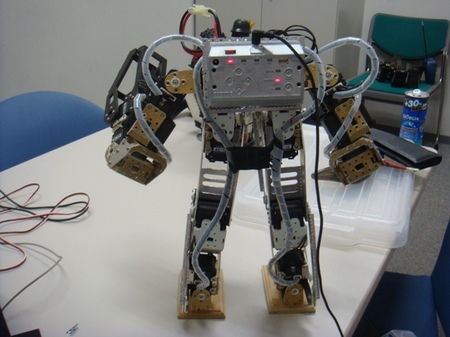
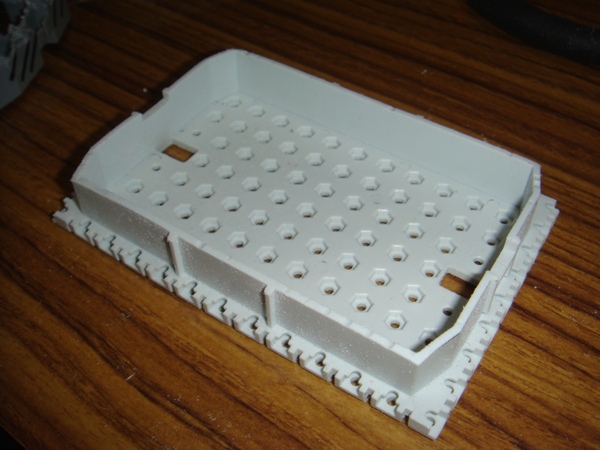
この間のeとぴあロボット工作講座の時に作りかけてた電池ボックス(兼:ボディ)を完成させました。
(いったいこのロボットの完成までに何年かけるつもりなんだろうw)
固定は支柱を立ててナット止めします。

こんな感じで、顔をつけてみたのですが、ちょっと不細工ですね(汗

アシモみたいなフルフェイスとか、アッガイみたいなモノアイとか、実際スペースが少しあるので、本物のカメラを仕込もうかとも考えたのですが・・・。
とりあえず、この目になりましたw
ステッカーは適当に作ったのですが、ロゴはクリアシートで作ったほうがよさそうですね。
とりあえず、前に作ってたテストモーションです。
あとは、足裏のサイズアップと、老朽化によるネジの全交換です。
そういえば、交換するネジを計算してたんですが、300本超えてて驚き。
内訳はM2×6mmビス約250本、M2×8mm 約100本 M3×10mm 約20本。
ちょっと奮発してステンのSタイトにしようかな。
(最近Sタイトの意味を知りました。アクリル様に高価なタップを買う必要がなかったかと思うと・・・orz)
8/22(日)サンポートのeとぴあにて、熊工房&香川ヒューマノイドロボット研究会の初回のロボット工作講座を開催しました。
そのお手伝いに行ってきました。
小学生の親子10組が参加してくれました。

内容は工具の使い方から、ロボットの組立まで。
組み立ててもらったRobovie-iにサンプルモーションを入れて相撲大会をして終了。
次回予定はソフトウェアの製作までとのことです。
合間で、KO-LINKのバッテリーケース兼外装を作るべく、低発砲塩ビ板を削ってました。
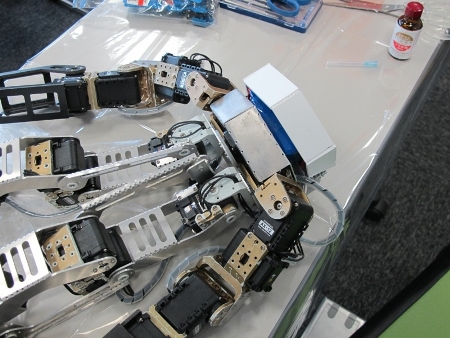
とりあえず、現地で適当に作ったモーション。
はじめはトルク不足で屈伸がまともにできない感じだったのですが、スピードをいじりながらなんとかなりました。
相変わらずのAX-12ですが、スピードは遅いながらも、まぁ、まだ使っています。
とりあえず、こんな感じですが、明日はマターリ楽しめたらいいなということで、KUMACOとG-ROBOT合わせて9本になったリポの充電に今から取り掛かります。
(PS:今日の日記、イベントレポートなのに控え室の写真しかないというw)

ベステクで春に発売を発表していたBioloid用のZigBeeコントローラRC-100。
やっと販売開始とのことで早速送ってもらいました!
次の土日にいろいろいじってみます。
CM-5を改造したということで、当然サーボはAX-12なのですが・・・
ファームが消えていたAX-12をベステクに送ったところ6つはファームを書き込んで送ってくれました!!

(しかも無料でした)
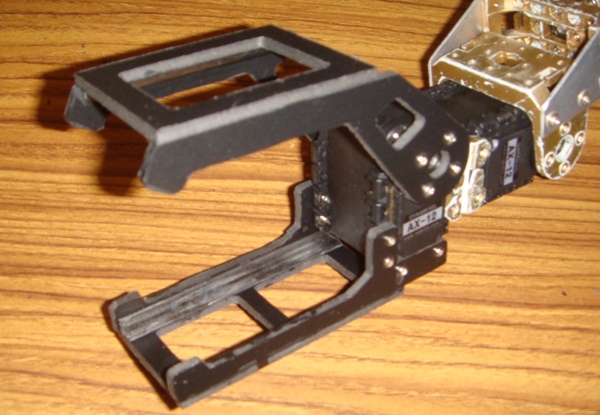
というわけで、手の設計。
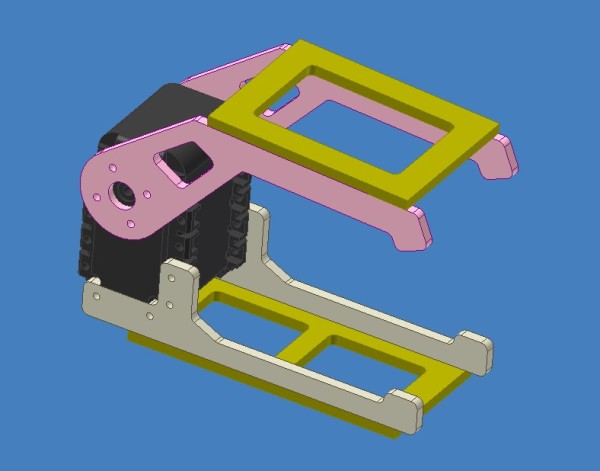
素材は低発泡塩ビ板です。
大熊さんにモデラで切り出していただきました。
アクリサンデーで溶着しました。
角は5mmの三角のアクリル棒で補強しています。

というわけで完成がこちら。
全体像はまだ秘密です。(隠すほどのモノではないですが)
あと、残るは配線と電源回り、あと頭部の作成でハードウェアは終了です。
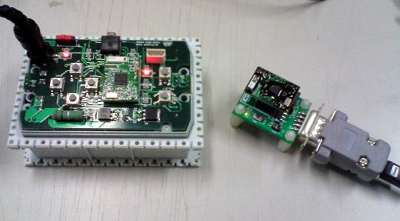
バイオロイドの標準コントローラCM-5を改造してみた。

まず、通信用にZigBeeモジュールを接続しました。
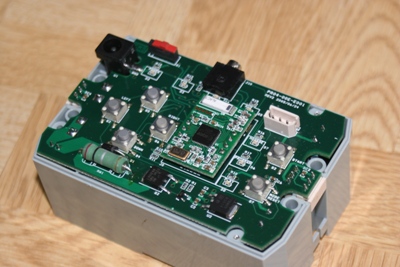
そして、小型化するためボックスの加工を決行!
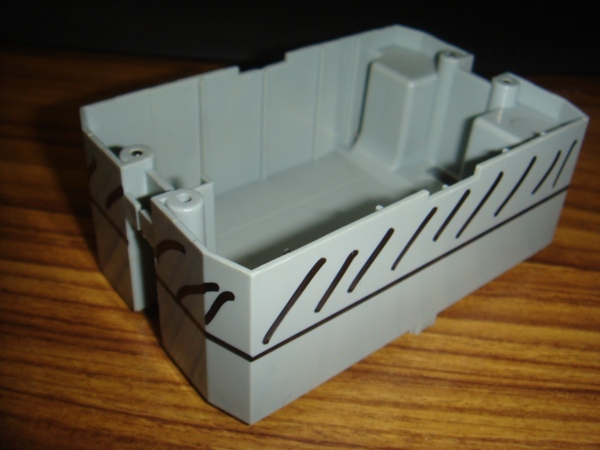

ミニ四駆の肉抜きみたいな切断のやり方を取りました。
正直、バンドソーがあったらどんなに楽だったか・・・。
バンドソー欲しいです。

3300μFの電解コンデンサ2器がなかり場所を取っていたので寝かせました。
それでも余った空洞がもったいないのが残念。
シート型電解コンデンサなんてあったらいいのにねぇ。

そんでもって、シルバーカラーに塗装。
ボックスの蓋もスリム化しています。
バッテリーは標準の8セルのニッケル水素から3セルLiPoに変える予定なので、かなり軽量化できる見込み。
さて、これを使って何をするか・・・次回につづく。
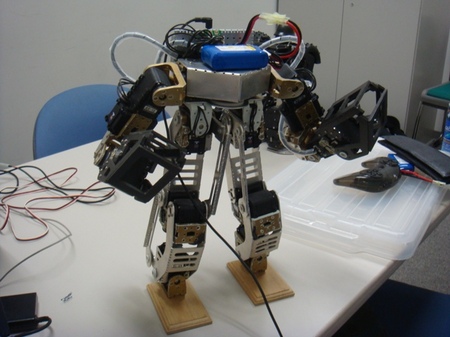
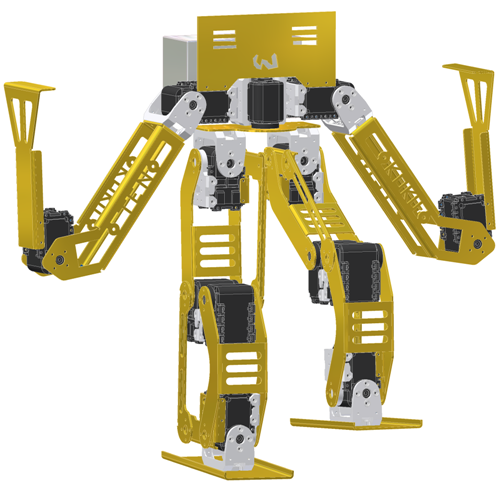
ソフトの方ばっかり力を入れてたんですが、いいかげん全体を組み上げる必要があったんで、組み立てました。
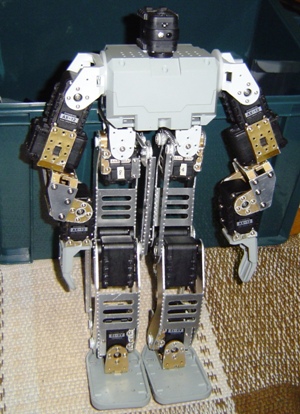
本当は上半身も新しく設計したかったんですが、ファイトまで時間がないので上半身はベースがバイオロイドで手はKOKUTEN3という感じで有りモノでまとめてしまいました。
それにしても足が長い!!
足だけで30cm超えてますwww
メインは平行リンクの制御なんでとりあえず上半身はオマケということで・・・。
ただ、ソフトの方を弄っているのだけどCM-5の通信が芳しくない。
というか、ZigBeeが意外とパケットを落としているような・・・。
スペックと実測の通信距離に意外と差がある気がします。
あと、VisualStudio側のプログラムとCM-5のタイミングをもっと切り詰めないと・・・。
とやっているとモーションを作る時間が・・・。
卒業研究の方が忙しくて平日なかなか時間がとれません。
ついでに今週末は東京で予定があって弄れません。
でも、東京に行くついでにJinSatoさんのトコにお邪魔させてもらおうと思っています。
それは楽しみだったり(笑
あと、ぶっちゃけた話、金銭的にキツイ。
2体エントリーして2日間戦うとエントリー代と宿泊で+1万。
恥ずかしい話、先月に自作PCを弄りすぎてちょっとヤバイ。
とりあえず2日目のSRCと懇親会の参加でKO-LINKは展示用に持っていこうかと。
平行リンクの制御に重点を置いているんで、微妙な出来なら動かさないほうがいいだろうなぁ。
あんまり遅くなると運営に迷惑かけると思うんで、今日明日で結論出そうと思います。
さて、もうちょっと弄るか〜〜〜!w
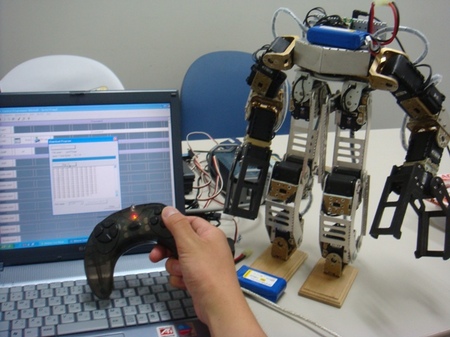
成功しました!
CM-5にZigBeeを載っけて、パソコンのZigBeeと通信に成功しました。

パソコンから0.5秒ごとにコマンドを送ってCM-5のLEDを点滅させる動画
動画で見ても面白くないですね(笑
CM-5はATmega128なので、シリアルポートは共有してる!の仮定は間違っていたようです。
CM-5のZigBee専用のプロトコルしか受け付けないようです。
1 バイト目:0xff 固定
2 バイト目:0x55 固定
3 バイト目:DATA の下位8 ビット
4 バイト目:DATA の下位8 ビットを論理反転
5 バイト目:DATA の上位8 ビット
6 バイト目:DATA の上位8 ビットを論理反転
ただ、CM-5からZigBeeで送られてくるパケットは、シリアルポートの情報も混じって送られてくるため、まだうまく受信できてません。
なぜ、シリアルの情報が混じっているのかも謎ですが、もう少しいじってみる必要がありそうです。
とりあえず、パソコンからCM-5に一方通行でも通信できたので、少なくともフィードバックなしでも、コントローラーで操作出来そうです。
ここまでVisualStudioで作ってきましたが、GUI関係はHSPの方が慣れてるんでこっから急造仕様でコントロールのプログラム作ろうかなぁと。
せっかくROBO-ONEでHPIさんからG-ROBOTS頂いたのにDynamixelばっかり触ってて申し訳ない気もするんですが、このロボもROBO-ONE前から設定してたんで、ロボファイトはこいつでいけるところまで頑張ってみようと思います。
G-ROBOTSもCADデータ頂いたんで、次のKUMACO用にぽつぽつ設計はじめてます。一応w
研究のロボットの合間の息抜きに、ロボファイトのロボットを作る・・・。
ロボット三昧なみっちーさんですw
今日はやっとZigBeeいじれました。
CM-5の正体は、ATmega128だということは結構知られていることなのですが・・・。
ならばシリアル通信ポートが2つしかないATmega128、1つのポートはAX-12用にとってあるはずなので、「外部用のシリアルポートとZigBee用のポートは共有しているハズ!」とあたりをつけて実験してました。
結論から言えば「たぶん・・・。」
なぜ「たぶん」なのかと言うと・・・。
「CM-5 ->ZigBee」はシリアルに投げているパケットがそのままZigBeeの乗って飛んできました。ただ、「ZigBee -> CM-5」の通信がうまくいかない。
一方通行・・・。
単純に確認用にZigBeeに同じパケットを投げているだけなのだろうか…。
なぜだろう・・・。ZigBeeが故障してるんだろうか・・・。
もうちょっと探ってみたいと思います。
あとマニュアルに準拠した、制御用のパケットも実験してみようと思います。
あと、オマケ情報。
今回実験には「ZIG-100A」と「ZIG-100B」を使用してます。
「A」はCM-5専用で「B」は汎用品です。
「B」が研究室に数個あって、それを使えたら使いたかったものの、「A」じゃないと動かないような記述がベステクにあったので、今回、「A」をわざわざ買いました。
「A」と「B」の違いですが、結局足のピンの形状の違いだけのようで、基盤のパターンを見ても見える範囲内でまったく一緒だったので、思い切ってCM-5に「ZIG-100B」を、ZigBee用ボードに「ZIG-100A」逆刺ししてみました。
「A」と「B」で通信すること自体がベステクの「サポート外の行為」に当たるみたいなんで、どうせサポート外ならということで、ちょっと冒険してみましたww
・・・普通に動きましたwww
刺し方も強引に刺したわけじゃなく、すんなり刺さってなんか拍子抜けでした(汗
とりあえず、メーカーのサポートを受けられなくなるんで、CM-5同士で通信する、普通の使い方をする人はちゃんと指定された「ZIG-100A」を買いましょう!
あと、ZigBeeを半田付けするのも電波法に引っかかるんでやめときましょうね!
(今回、半田・加工等は一切行っていません。)
ロボット王国で注文していたZigBeeが届いた。

さっそくCM-5に接続!
というわけで、今日はここまでwww
通信とかはまた来週以降ということでw
今日のロボットの作業と言えば、研究で使うAIMOTORのCADを書いてみた。
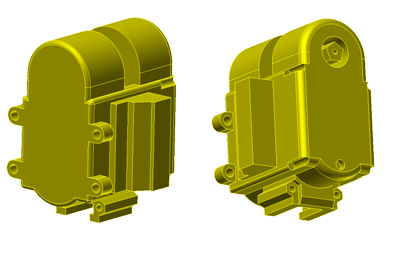
穴はしっかりと計測したけれど、あとは干渉チェックに使うだけなので、全体の精度はこんなもんでいいだろう。
Bioloid専用ZigBeeモジュール ZIG-100A(BTX037)

ツクモロボット王国にお願いして置いてもらいました。
納期は2週間ほどということで、注文しました。
PS:
ベステクから昔発売されていたBTX020 AIMOTOR601。
誰か3DのCADデータなんて持ってないでしょうか?出来ればInventorで読めるので・・・。
徹夜で両足が出来た。
ここから先、上半身はあまり考えてないので、考えていこう。
条件としては
・ AX-12はあと8個
・ AX-S1搭載
・ 制御基盤にCM-5を使う
・ リポ搭載
・ ZIG-100A搭載

さて、HPI賞のG-ROBOTSが届きました。
この3連休に組み立ててレポートを書こうと思います。
が、この3連休いろいろ予定が・・・忘れないように。TODOメモ
・ G-ROBOTS組み立て
・ ZIG-100A注文
・ 久々に釣りに行く
・ フリーマーケット
・ KUMACOぷろじぇくとのHP更新
・ 簿記検定の申込み
・ ROBO-ONEで汚染した部屋の片付け。
よし、頑張るか。

平行リンクを仮組みしてみた。
適当に動かしてみた。(動画暗くてすみません。)
剛性が少ないAX-12がグニャっても上下にしか動かないのでバランスがいいのが嬉しい。
PS:HPI賞の景品が届いていたのだけれど、不在で受け取れず、明日の午後9時に届くことに。
待ち遠しい〜〜〜(o=´ー`=)o

KUMACOの調整を行いながら曲げてしまいました・・・。
CADで作ったとおりだーーー!!!
しかも、サーボに合わせるとぴったり!!!!
しかし、あと1日。
明日は朝から夕方までゼミなんで・・・。
さすがに、ROBO-ONEに持って行くのは無理かなぁw

さきほど、ヴィストンより切削済みのアルミパーツが届きました。
ほぼ1週間で完了しました。
たまたま、仕事が空いていた時期だったみたいで、普段はこんなに早く来ることはないようなのですが・・・とにかくラッキーでした。
ROBO-ONEに向けてKUMACOの調整をしているので、平行リンクロボは来週以降・・・のつもりですが。
たぶん、組み立てちゃうんだろうなーww
それにしても、ホントにキレイ!!
旅行から帰ってきました。
旅行前にヴィストンに注文していたため、旅行中にメールの返信が出来ずヴィストンさんには迷惑かけました。すみません。
帰ってきて、DXFファイルを送ったところ、ちょうど予定が合ったようで、3回ほどファイルの修正を行って、早々の切削開始になりました。
1週間ほどで完成品が送られてくるそうで、楽しみです。
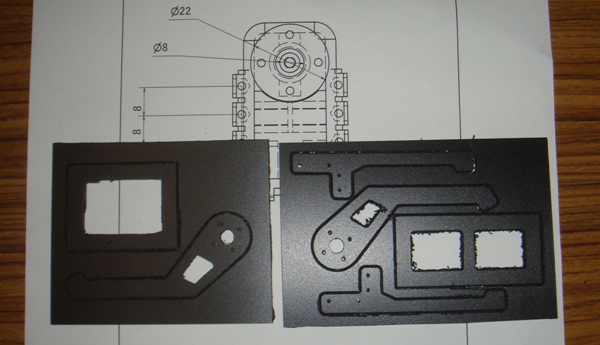
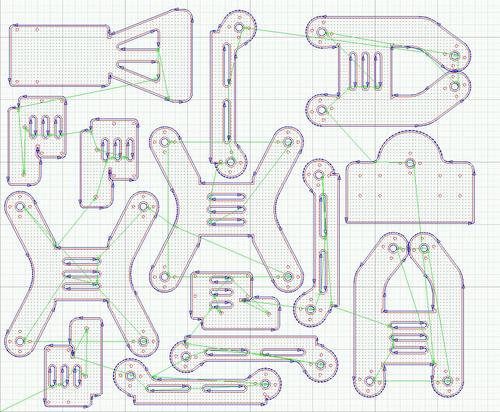
下の図面はヴィストンから届いた切削の道順。
スペースが多いので、頑張ればもう1パーツくらい配置出来たかもしれませんが、とりあえずもう一回切削してもらうつもりなので今回はこれで出しました。
顔を ”泉 こなた” 風にしてみた・・・。
わかり難いネタでごめんなさい。m(_ _)m
ここまで、作っておいて「今更外装のないロボットを作るのは・・・」とか、考えてしまってどうしようか悩んでしまったり。
少し古いロボコンマガジンを読んでいてバイオロイドのCM-5の使い方のコーナーがあったことに気づいた。
がむしゃらにSH2で制御する方法ばかり考えていたけれど、CM5とAX-S1を用いて、いろいろ遊んでみようかなぁと思ったり。
そうなると、アルマイト加工はやりすぎ?
とりあえず、このロボットはバイオロイドを遊びつくす最後の段階として作って、AX-12を使い潰してみようかなぁと思ってます。
・・・だが、今はホントにしなければならないのはKUMACOのシナリオを作るためのプログラム作り。
ROBO-ONEまでの日数は刻一刻とせまってる〜〜〜〜!
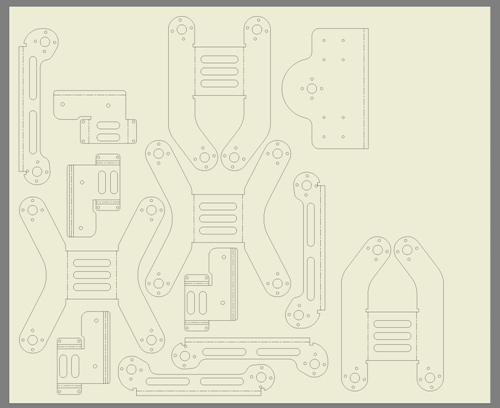
平行リンク足ロボットの上半身を設計を始めた。
ヨー軸もいろいろやってみたけれど、リンクを使うと中途半端な場所にモーターを配置することになるし、ギアを使って組んでもモーターより軽く作れないので、ヨー軸そのものを却下。
とにかく軽さで勝負しようと思い、KUMACOと同じ13軸で構成する方向で考えてみた。

左半身をつけたのが、この図なのだが、今回のROBO-ONEの腕の長さ(足の長さの120%以内)のルールに則るとこんなに長くなる。
アルマイト加工の上限が1パーツ1辺15cm以内とのことなので、その関係でまだ120%に満たないが、それでも最大長の状態で手が地面を突き抜ける。
足裏などは、規定にしばられて”いっぱいいっぱい”な感じだけれど、腕の長さの120%というルールは意外と面白いかもしれない。

片手を着いた蹴り!
とはいえ、このロボット、ROBO-ONE用じゃありませんww

曲げで強化しつつ、肉抜きして現在こんな感じ。
1枚で支えているところが、本当にアルミで強度が足りるのかが不安。
とはいえ、ジュラルミンとか鉄とか加工できませんから、無理なときはアクリルあたりも使うしかないかな。
現在、側面の肉抜きを、どんなデザインで行うか考え中。
同時に、現時点で実際に330*400の上に配置してみた。
足のパーツだけだと、まだ、余裕がある感じ。
ここまできて、やっぱりヨー軸は追加しようという考えに至る。
ヨー軸も、リンクがギアを使ってサーボ1つで制御できるはずなので、その構造を考え中です。
「逆運動学で制御でき、モーターの数を可能な限り少なくし、稼動は最大限」が目標。
あと、両手両足にPSDセンサを配置したいと思う。
それも考慮にいれてさらに設計を進めていこう。
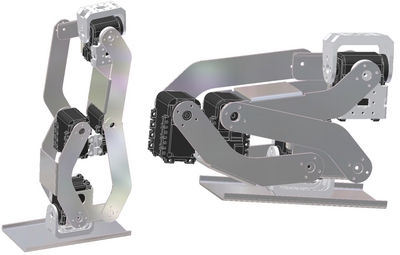
ロボットっぽく行くならとことんカウルだ!!
ってわけで、囲えると思ったところを囲ってみて4点支持の方向で考えてみた、途中経過の図。
ここまで作って、当初の目的のひとつ「軽量化」を思い出す。
ん〜。
ビジュアル重視?軽量化重視?
サーボ1個減らしたとはいえこんなにアルミを増やしたら意味なさそうだし・・・。
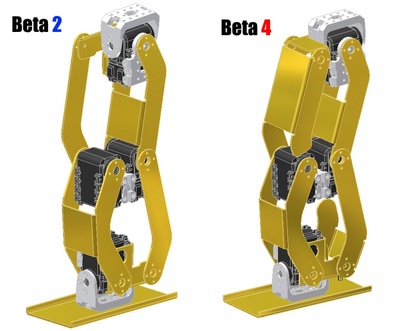
パフォーマンス重視して潔くβ-2に戻るべきかなぁ・・・。
それとも板厚1.5mmで設計してたけど4点支持だからいっそ1mmにしちゃってビジュアルを通すか・・・。
ただ、そもそも、こんなに加工精度のいる設計して大丈夫なのか!?
--
追記
更に進めてみる。
アルマイト加工も視野に入れてゴールドにしてみた。
4支点の止め方が思いつかなかったので3支点にして、カウルだけやってみると、ちょっと微妙になった。
色をつけるとそれだけで存在感が出てくるのでβ2版でもいいかなという気がしてきた。
外注するならVistonかなぁと思って、Vistonのサイトを見ていたけど、DXFファイルで出力の方法が良く分からない。HELP!!
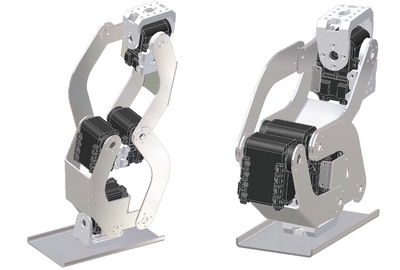
「しゃがみ」のときの重心を最小限まで下げるように、改良。
あと、無駄にくの字に曲がりすぎていたところを改良。
ロール軸の稼動範囲がもう少しどうにかならないか考え中。
あと外装のことも考え中。
ニーボマンやR-Blueの足がいいよーー!
って、事で書いてみました。
未だにAX-12をやめられていません。
買ったFutabaのシリアルサーボもあるんですが、サーボ1個ではロボットにならないのでモチベーションが上がらないというか…箱のまんまです。(汗
HitecはKUMACO専用なんで、結局AX-12でKOKUTEN4にでもしようかと設計中。
干渉に稼動範囲に・・・。
まだまだ未熟な感じです。
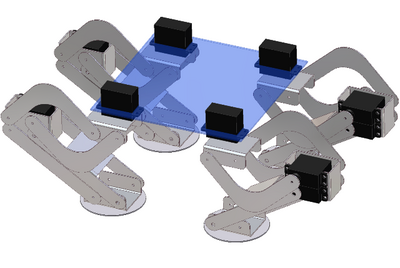
研究室の仲間が四足歩行の研究をしているのですが、僕ならこんな足を作ってみようか・・・と思って、レスコンが終わってからまったくいじってなかったインベンターのリハビリも兼ねてアイディアを書いてみた。
接続部はネジも使わず空中で拘束ww
機構だけは二足歩行にも使ってみたいと思っていた平行リンクを4足用の足に用いてみた。
● 書いてみての結論。
ラフスケッチすらなしで、寸法の決まっていない図面を想像で形にしていく作業は思った以上に大変だった。
● 独り言
あと、KONDOのサーボのCADデータとかどっかに落ちてないですか?
最近注目しているロボット(機構)があります。
前から注目はしていましたが、吉村さんのところの、リンクで動く足。
それと、ロボットフォースの佐々機さんのニーボマン。
このロボットの共通点はリンクで足が構成されピッチ軸のサーボが2つであるという点です。
逆運動学は本来、3次元上の物体を表すのに、位置と姿勢で6自由度持っています。
よって一般敵に座標情報のx y zの情報と姿勢情報のθ φ ψの6つの独立変数で表現されます。
僕が公開しているKOKUTEN3用の逆運動学はxyzの3変数だけですが、これは姿勢情報に「足裏が地面と水平になること」という、拘束条件をつけることで強制的に3つの独立変数で表すようにしています。
今、作っている二足歩行用の新しいプログラムでは足裏の姿勢制御も含めた6変数で公開している逆運動学をさらに改造したヤツなんですが、姿勢情報のうまい制御法が思いつかず、結局水平の拘束条件をつけて運用しています。
そんな状況なので、「つま先」の制御も進んでいません。
そんな状況がしばらく続いているときに、見てしまったのがニーボマン、そして現在製作中らしい吉村さんの新しい足。
この足は、僕がプログラムで実行している「足裏が地面と水平になること」という拘束条件をリンク機構で実現しています。
利点としては
リンク機構ということで加工精度によるガタが気になるところではありますが、吉村さんの記事では「拘束がくずれなくてすごい」とのこと。
吉村さんの加工精度の高さゆえという気もしますが、今一番見てみたいロボットです。
この先、どうせなら、ロール軸もリンクで作って、「片足4サーボでロール・ピッチ・ヨー」の制御が出来ます!なんてロボット作ってくれないかなと思ったりするのですが・・・(笑
ぬいぐるみロボットは、微妙にスポンサーがついたりで順調に進んでいるのですが、しっかり歩けるロボットの開発の方は資金的に厳しくて、プログラムばっかりいじってる状態なので、リンクでコストを下げたロボットを作ってみたいなと・・・そんな近況でした。
可愛いのもいいですが・・・。
やっぱり、ガシガシ歩くのもいいですよね!










最近のコメント