
研究のロボットの合間の息抜きに、ロボファイトのロボットを作る・・・。
ロボット三昧なみっちーさんですw
今日はやっとZigBeeいじれました。
CM-5の正体は、ATmega128だということは結構知られていることなのですが・・・。
ならばシリアル通信ポートが2つしかないATmega128、1つのポートはAX-12用にとってあるはずなので、「外部用のシリアルポートとZigBee用のポートは共有しているハズ!」とあたりをつけて実験してました。
結論から言えば「たぶん・・・。」
なぜ「たぶん」なのかと言うと・・・。
「CM-5 ->ZigBee」はシリアルに投げているパケットがそのままZigBeeの乗って飛んできました。ただ、「ZigBee -> CM-5」の通信がうまくいかない。
一方通行・・・。
単純に確認用にZigBeeに同じパケットを投げているだけなのだろうか…。
なぜだろう・・・。ZigBeeが故障してるんだろうか・・・。
もうちょっと探ってみたいと思います。
あとマニュアルに準拠した、制御用のパケットも実験してみようと思います。
あと、オマケ情報。
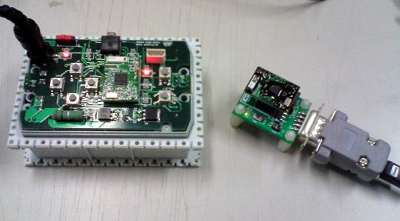
今回実験には「ZIG-100A」と「ZIG-100B」を使用してます。
「A」はCM-5専用で「B」は汎用品です。
「B」が研究室に数個あって、それを使えたら使いたかったものの、「A」じゃないと動かないような記述がベステクにあったので、今回、「A」をわざわざ買いました。
「A」と「B」の違いですが、結局足のピンの形状の違いだけのようで、基盤のパターンを見ても見える範囲内でまったく一緒だったので、思い切ってCM-5に「ZIG-100B」を、ZigBee用ボードに「ZIG-100A」逆刺ししてみました。
「A」と「B」で通信すること自体がベステクの「サポート外の行為」に当たるみたいなんで、どうせサポート外ならということで、ちょっと冒険してみましたww
・・・普通に動きましたwww
刺し方も強引に刺したわけじゃなく、すんなり刺さってなんか拍子抜けでした(汗
とりあえず、メーカーのサポートを受けられなくなるんで、CM-5同士で通信する、普通の使い方をする人はちゃんと指定された「ZIG-100A」を買いましょう!
あと、ZigBeeを半田付けするのも電波法に引っかかるんでやめときましょうね!
(今回、半田・加工等は一切行っていません。)









