
ƒچƒ{ƒbƒg‚ًWindows‚©‚çTCP/IP‚إگ§Œن‚µ‚و‚¤‚ئژv‚ء‚½پB
“‚“ث‚ة‚—
‚»‚ê‚إپAWinSock2‚إƒvƒچƒOƒ‰ƒ€‚ًڈ‘‚¢‚ؤ‚ف‚½پB
ƒCƒ“ƒNƒ‹پ[ƒh‚µ‚ؤپAƒTƒ“ƒvƒ‹’ت‚è‚ة‚â‚ء‚½‚ç‚·‚®ڈo—ˆ‚½پB
‚â‚ء‚د‚èپAƒpƒ\ƒRƒ“‚جƒٹƒ\پ[ƒX‚ح‚·‚²‚¢پACOMƒ|پ[ƒg‚جگ§Œن‚à‚·‚®ڈo—ˆ‚½‚µپATCP/IP‚àپEپEپEپB
ڈ¬‚³‚بƒpƒ\ƒRƒ“‚ًƒچƒ{ƒbƒg‚ةچع‚¹‚½‚¢‘z‚¢‚ھ‚ا‚ٌ‚ا‚ٌ‹‚‚ب‚ء‚ؤ‚«‚ؤ‚é‚—‚—
‚ئ‚è‚ ‚¦‚¸پAژQچl‚ة‚µ‚½ƒTƒCƒg‚ً‰؛‚ةپEپEپEپB
winsockƒvƒچƒOƒ‰ƒ~ƒ“ƒO
http://www.geekpage.jp/programming/winsock/
WinSockٹضگ”ˆê——
http://www.golgo.jp/winsock.html
WinSock2 ƒvƒچƒOƒ‰ƒ~ƒ“ƒOپiƒTƒ“ƒvƒ‹ƒ\پ[ƒX‚¢‚ء‚د‚¢پj
http://winsock2.org/
RS301CR‚جCADƒfپ[ƒ^‚ھ—~‚µ‚©‚ء‚½Œڈ‚إ‚·‚ھپAUE‘؛‚³‚ٌ‚جƒAƒhƒoƒCƒX’ت‚èپA‚e‚t‚s‚`‚a‚`‚³‚ٌ‚ة–â‚¢چ‡‚ي‚¹‚½‚ئ‚±‚ëƒfپ[ƒ^‘—‚ء‚ؤ‚‚¾‚³‚¢‚ـ‚µ‚½پIپI
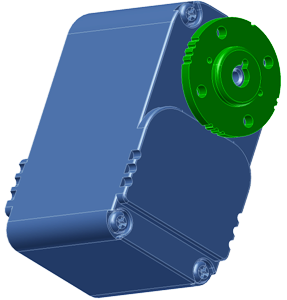
‚±‚ê‚إپAKUMACO‚جگفŒv‚µ‚ؤچs‚±‚¤‚ئژv‚¢‚ـ‚·پB
UE‘؛‚³‚ٌ‚ ‚è‚ھ‚ئ‚¤‚²‚´‚¢‚ـ‚·پB
FUTABA‚³‚ٌ‚ ‚è‚ھ‚ئ‚¤‚²‚´‚¢‚ـ‚·پB
‚ف‚ب‚³‚ٌ‚àFUTABA‚جƒTپ[ƒ{‚إگفŒv‚·‚éچغ‚حƒپپ[ƒJپ[‚ة–â‚¢چ‡‚ي‚¹‚ؤ‚ف‚ـ‚µ‚ه‚¤پI









