

ロボファイト4に参加してきました。
KOKUTEN3は、初戦がイカロスさんだったんですが、棄権により不戦勝。
2戦目で振武とあたったのですが今回もストレートで負けてしまいました。
モーションの作りこみが間に合わず、攻撃と歩行の連携がぜんぜん繋がりませんでした。
モタモタしてる間にドンドンやられちゃいました。
敗者復活戦があったのですが、そっちも初戦は不戦勝で2回戦にあるばーとさんのブレイバートにあたりました。
本戦で操作法を忘れてしまったといっていたあるばーとさんですが、ジャンプで旋回するなど、ロボットの出来の方はすばらしいものでした。結果やっぱり負けてしまいました;;;
どうも、KOKUTEN3はまだまだ作りこみが足りないようです。
そんで、ブレイバートとの戦いでサーボが死んだんですが、今回はじめてAX-12のギアがかけました。
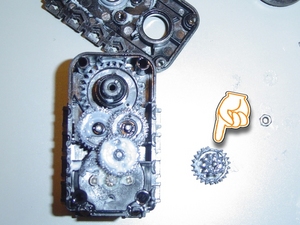
今まで、ソフトウェア的に死んでばかりのAX-12だったのですが、なんか、普通の死に方をしてくれて逆にホッとしてたりwww
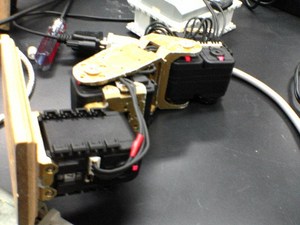
とりあえず、直前に死んだAX-12を持って来てたので、ギアを交換して修理。
バトルカオスには元気なKOKUTENで出場し、なんとか20ポイントゲットで青チームに貢献できましたww














最近のコメント