

疲れました〜。面白すぎですカントリー4♪
(写真はメロスのハーレムの図)
懇親会で店を間違えて1時間遅刻して行ったのが悔やまれます;;
帰りの電車でのロボットトークは面白かったです。
ん〜、今回はいろいろ無理がありました。
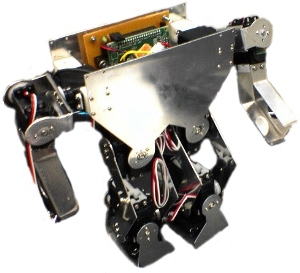
やはり、構造的に膝なしでは、動き・スピードに限界がありますね。
そして、一番、悔しかったのはランブルの途中に電源スイッチがOFFになったことでしょうか。
また、自分の担当の回路設計的にも、いろんな課題を残しました。
ソフトウェアの割り込みの制御のあたりで今回、中村博士にお話を聞けたのはほんとうに有意義だったと思います。
実際、そのまま搭載するのもなんですし、H8マイコンにモーションプロセッサーほどのパワーがないので、その辺はオリジナルにしながら、参考にしたいと思います。
また、大会の途中でなんとなくベステクさんのヘッダファイルの説明文を読んでて、なんかいろいろ閃きました。
とりあえず、昨日完成といったボードはぜんぜん完成ではないです。
教材用としては、あれでいいんですが。
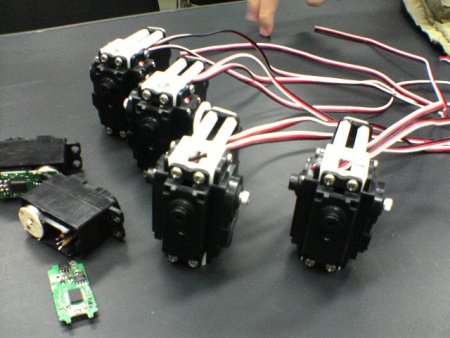
実践用は「24PWMサーボ制御 + AX12サーボ制御基板」にしたいと思います。
どっちか選んでもよし、両方混在してもよしみたいな感じに行きます。
ぶっちゃけ、40軸PWM + ・・・ でもいいんですが・・・。
あと、今回面白かったこと。
マイクロマウスを初めて見ました。まさか、あんなに速いと思いませんでした。
三月兎さん、ほんとありがとうございます。
機会があれば、ぜひやってみたいと思います。
ん〜。でも、マイクロマウスやるとROBO−ONEの機体の時間が・・・。(ー’`ー;)ウーム
なにをやっても時間がたりないHM(みっちー)でした。












最近のコメント