
実は作ったのは2週間前なので、Twitter経由で見た人は知っているかと思いますが、VS-RC003をベステクのZigBee経由のシリアルで制御するためのボードを作りました。
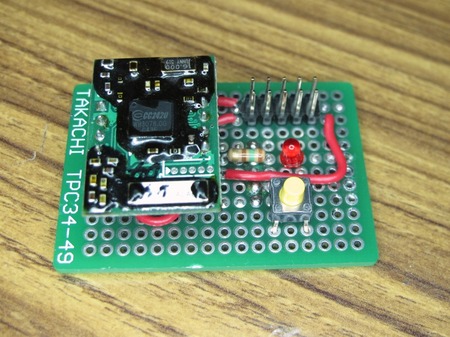
VS-RC003と接続するとこんな感じです。

これの動作テストが今日やっと出来ました。
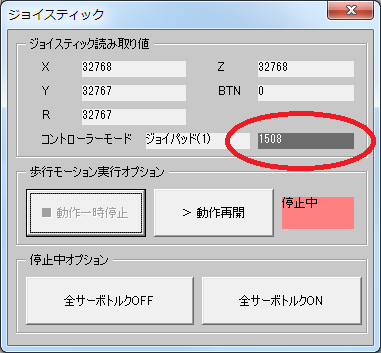
とりあえず、Vstoneのサイトのシリアル制御のマニュアルに載っていたコマンドでテストしてちゃんと動くことを確認できました。
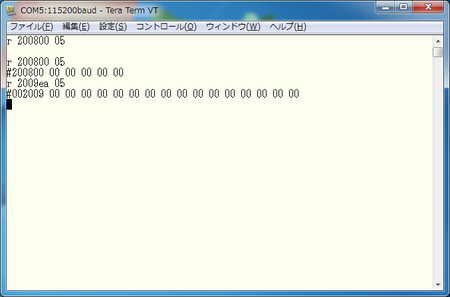
まぁ、VS-IX003の代わりにベステクのZigBeeに置き換えただけなんですがね(笑)
これでDreamDrive!!のロボットすべてがZig-Beeのネットワークに乗りました。
- KO-Link2 (CM5 + Zig100A)
- RC-100Z (Bioloid用のコントローラー + Zig100A)
- KUMACO (VS-RC003 + Zig100B)
- SARUBO (VS-RC003 + Zig100B)
- Dream PathFinder (VS-RC003 + Zig100B)
- G-ROBOTS (RPU-11 + 変換 + Zig100B)
- USBシリアル変換ケーブル + 変換 +Zig-100B (PC側)
どんだけベステクのZigBee好きやねんwって感じですねw
また、今回単純にVS-RC003のシリアル通信の確認も兼ねてたので、これでロボdeサバゲの方もBeagleBoard + VS-RC003で開発を進める見遠しが立ちました。
- BTX025 ZIG-100B
http://www.besttechnology.co.jp/modules/knowledge/?BTX025%20ZIG-100B- 第10回 ロボットをシリアル通信で動かす(前編)
http://lets-robot.com/modules/roboviemaker2/index.php?id=40- 第11回 ロボットをシリアル通信で動かす(後編)
http://lets-robot.com/modules/roboviemaker2/index.php?id=41






![【送料無料】 RING 48 マクロ LED リングライト [ACアダプタ付属][Macro LED Ring Light][マクロリングライト]](http://ecx.images-amazon.com/images/I/417izgwOKtL._SL160_.jpg)










最近のコメント