
AR.Droneはどこまで飛べるんだろう・・・。
というわけで、実際どのくらいの距離までコントロール可能なのかを明らかにするために実験してきました。
実験場所は前回と同じ、香川県総合運動公園
実験機は、AR.Drone(初代)
クライアントは4種類
- iPhone4 (ソフトウェア:AR.FreeFlight2.0)
- iPad(初代) (ソフトウェア:AR.FreeFlight2.0)
- Intel WiFi Link 5100 AGN(ソフトウェア:ARDrone Control-1.2.0)
- Ralink RT73(ソフトウェア:ARDrone Control-1.2.0)
ARDrone Control-1.2.0は、WIndows7 64bit搭載のいつもの作業用メインノートVAIO typeZで実行します。
結果は以下の通り

距離の計測はgoogleマップにマッピングした2点間を緯度経度から計算しています。
多少アバウトな数字になっています。
グラフにすると以下の通り
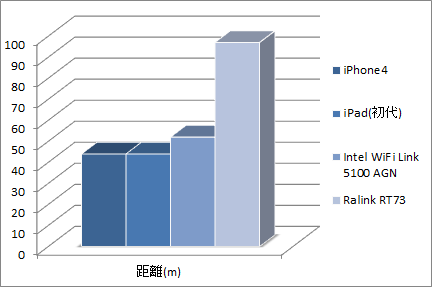
意外と電波飛びません。
コマンドが送れなくなりリンクアウトした距離(制御可能限界距離)を計測していますので、実際、映像転送をそこそこのフレームレートで行い、スムーズに操作できるのは、この半分の距離が目安といったところです。
実感としてはクライアントの電波というより、AR.Droneからの電波が弱いといった感じでした。
あくまでも平面方向の距離なので、上空に向ける電波の送信距離はまた異なった結果になるかもしれませんが、実感としては大体あってるかなと思います。
とりあえず、iPhoneのクライアントの高度制限が100m上限になっていますが、100m飛ばしたときにはすでに、糸の切れた凧と同じで制御不能でどこかに飛ばされた後でしょうね。
あと、iPhone4とiPadの間にはまったく差がありませんでした。
今日もフラフラ動画を撮影してきましたw
画面酔いしたらすみません。操縦はiPhoneです。










撮影日が2007年になってるぞー
お久しぶりです〜!
そうなんです。
実は電池が切れるたびに時計がリセットするんです。
しかも設定はPCを繋げないと設定できないんで、面倒になってそのままだったり(汗